


以新产业人才需求为导向,新型工程科技人才培养为目标,按照国际工程教育专业认证要求,融合先进教学模式,将实际工程项目转化为教学资源,开发项目制教学课程,助力新工科建设。
携手宇树科技共建人工智能专业,聚焦具身智能与机器人AI核心赛道。秉持产教融合模式,共建实验室与课程体系,深度融合四足/人形机器人技术,培养具备算法研发、智能运维与场景落地能力的复合型人才,服务新质生产力发展。

本课程面向人工智能专业人才培养需求,使学生掌握机器人运动控制、ROS2开发、传感器数据处理等关键技术,理解强化学习、自主导航、步态优化等AI算法在机器人系统中的应用。通过实操训练,强化学生算法设计、仿真验证与实物部署能力,建立“算法-仿真-落地”的工程实践思维。
人形机器人*2,四足机器狗*3,实验室环境配置*1,系统部署培训*1
序号 | 实验项目 | 实验目的及内容 | 学 时 | 实验类型 | 实验要求 |
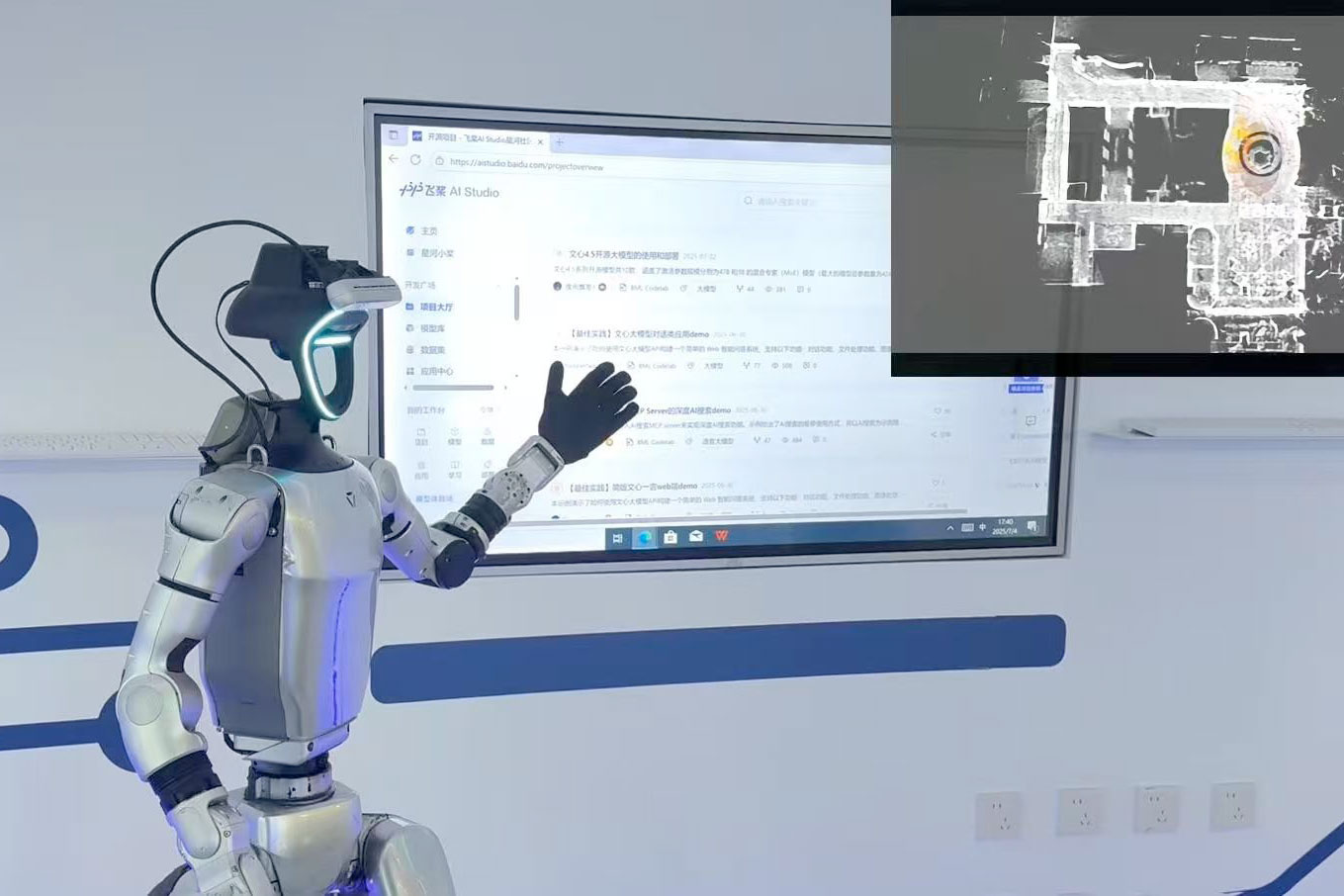
1 | 高层控制与避障导航 | 目标:掌握传感器融合与导航实现 内容:连接传感器,实现移动与避障,完成室内导航 | 8 | 基础 / 综合型 | 实现多步态切换,成功避障达目标,提交记录 |
2 | 底层关节与地形适应 | 目标:掌握底层控制与地形适配 内容:关节独立控制,规划轨迹,适配崎岖地形 | 10 | 综合 / 工程型 | 实现底层控制,地形稳定行走,提交参数报告 |
(PS:相关实验课程依据指导教材,专业以及课时数针对性为高校老师定制。)







 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |
































