


“京天机器人已经累计服务2127位高校用户。专注提供科研,教学,比赛和展示等方案。并在定位导航、人机协作、危险场景作业、多机协作、机器人控制和分析、勘测、机器视觉运动目标跟踪、智能机器人仿真与虚拟教学、人工智能/智能机器人实验室建设、机器人竞赛等多个领域拥有完整落地案例”
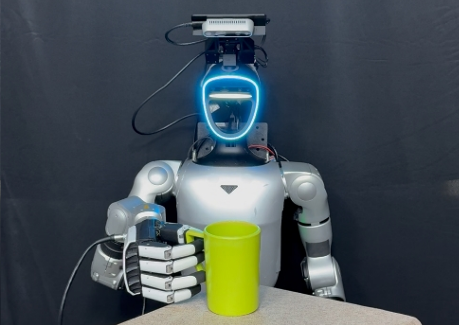
中山大学团队针对具备空间感知能力的仿生人形机器人全身操作任务展开研究,依托多智能体大模型的空间感知与动作生成能力,提出一种具备泛化能力的人形机器人移动-操作一体化框架:主
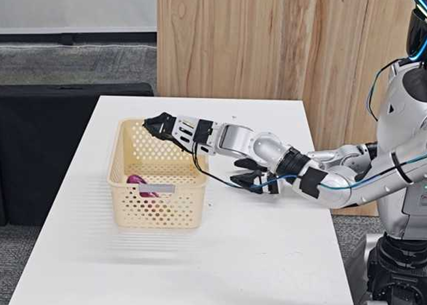
在具身智能领域,视觉 - 语言 - 动作(VLA)模型虽能迁移语义先验,但受限于静态图像 - text 预训练,难以捕捉物理动态;而视频生成模型虽蕴含丰富时空与物理信息,却未能与动作控制
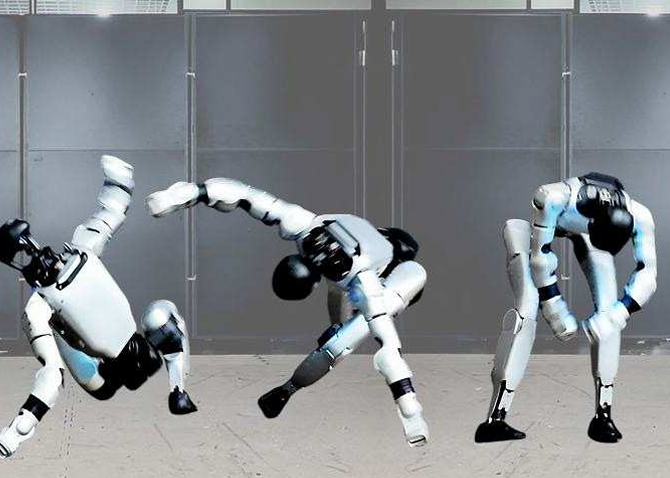
北京通用人工智能研究院研究团队提出 OmniXtreme 框架:一套专为高动态、大规模、高难度动作设计的统一控制方案。它通过 “流匹配预训练 + 驱动感知残差微调” 的两阶段 pipeline,让

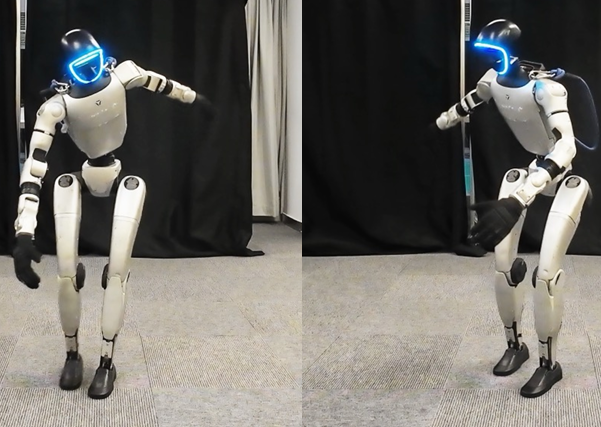
在人类生活环境中,人形机器人需要像人类一样协调全身完成各类任务 - 下蹲拾取地面物体、双手协同拔剑、动态投掷物品等。然而,现有方法要么依赖复杂的强化学习奖励工程,要么需要专

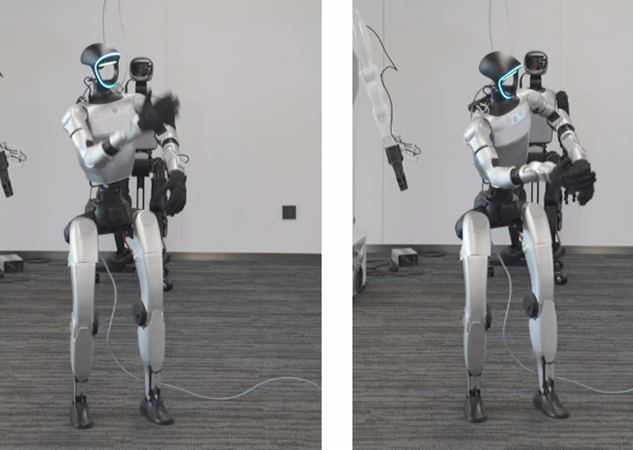
人类能在动态运动与精准平衡间无缝切换 - 跑步时灵活调整姿态,单腿站立时稳如磐石。但现有人形机器人控制方法往往难以兼顾这两种能力,要么侧重敏捷动态技能而牺牲稳定性,要么专注
NVIDIA、斯坦福大学等联合提出的CHIP(Adaptive Compliance Humanoid control through hIsight Perturbation),是一款轻量可插拔的柔顺控制模块。它无需大规模数据增强或奖励调优,
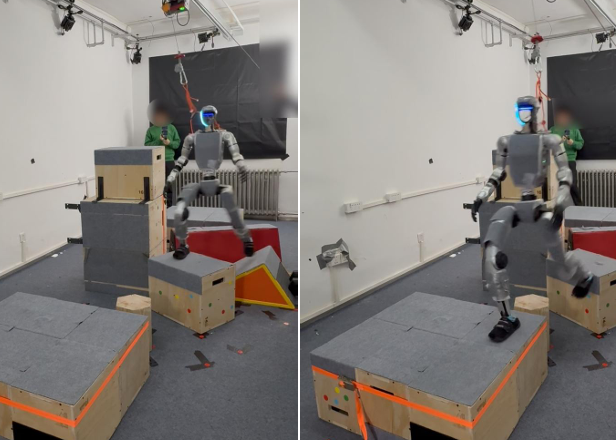
在具身智能领域,让人形机器人在未知复杂地形上实现高动态跑酷,始终是极具挑战性的课题。尽管通用运动策略已能应对多种常规地形,但面对楔形、桩体、窄梁等极端几何结构的障碍时,往
北京大学等团队提出的UniAct(Unified Motion Generation and Action Streaming for Humanoid Robots),是一款面向人形机器人的多模态实时控制框架。它通过 “统一离散标记化 + 多模
上海人工智能实验室联合北大、港中深、上交、复旦推出 BFM(Behavior Foundation Model):全球首个真正面向实体人形机器人的统一行为基座模型。它把所有控制任务(动作跟踪、VR 遥操

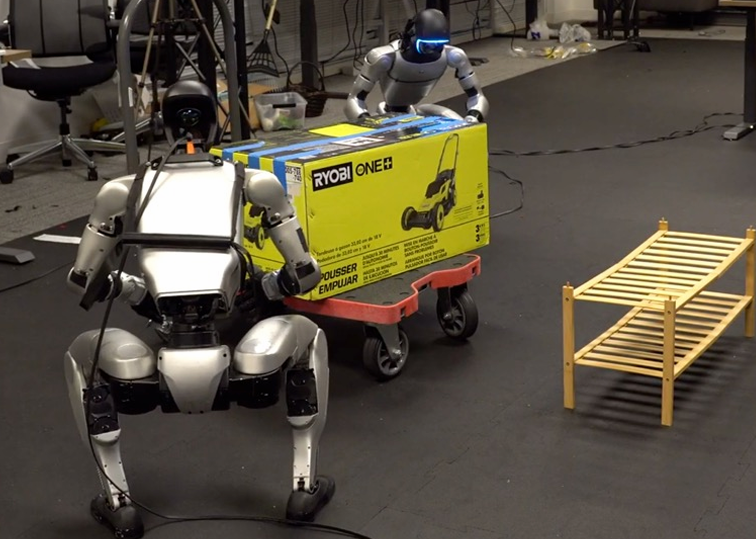
上海交通大学、上海人工智能实验室等联合提出的MLM(Multi-task Loco-Manipulation),是一款基于强化学习的多任务全身运动操纵框架。它融合真实世界与仿真数据,专为配备六自由度机

清华大学等团队提出的Hiking in the Wild,是一款面向复杂非结构化环境的人形机器人敏捷行走框架。它以 “端到端感知 - 控制” 为核心,通过深度图像实时感知地形,结合地形边缘安全
 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |
































