中山大学【具备泛化能力的移动-操作一体化框架】
客户名称:中山大学
应用类型:运动控制
项目时间:2026年5月
应用产品:人形机器人G1
应用类型:运动控制
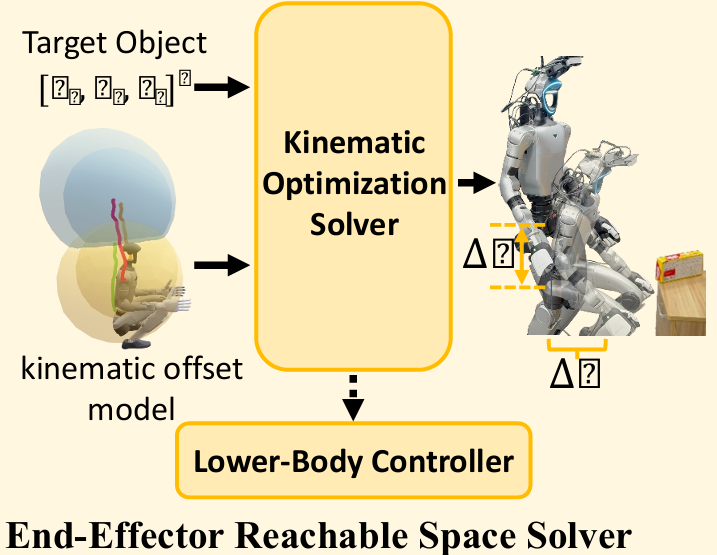
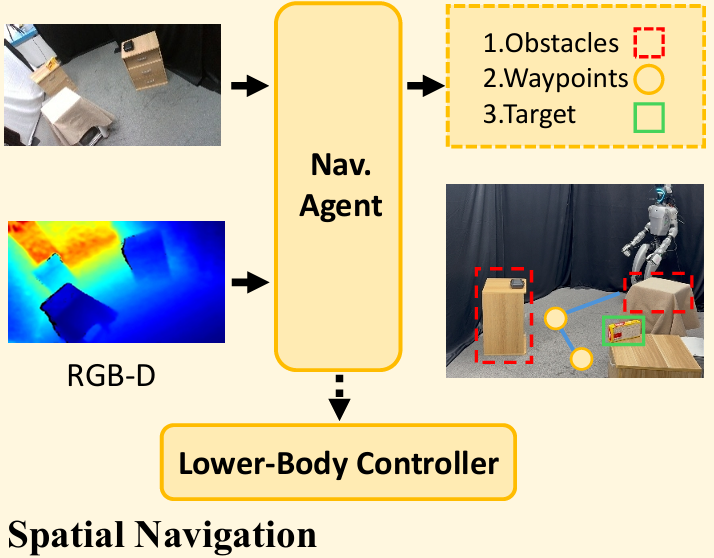
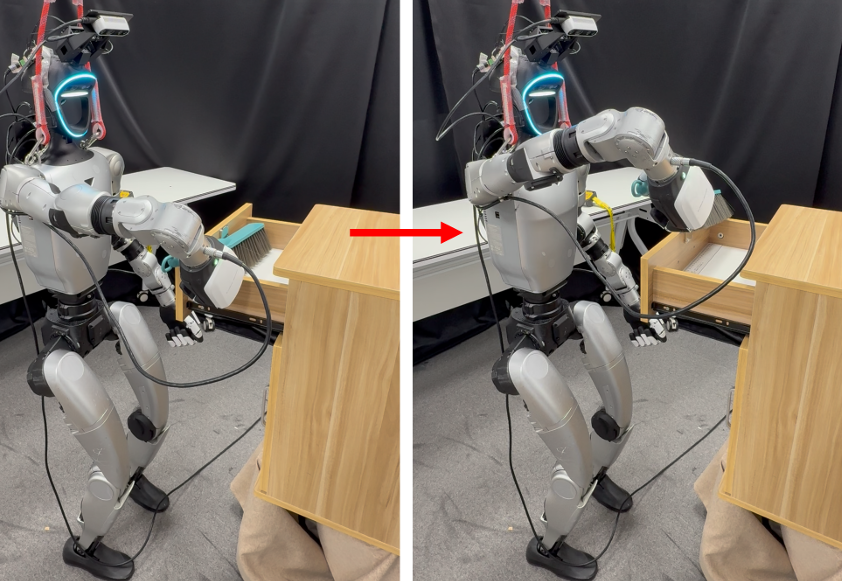
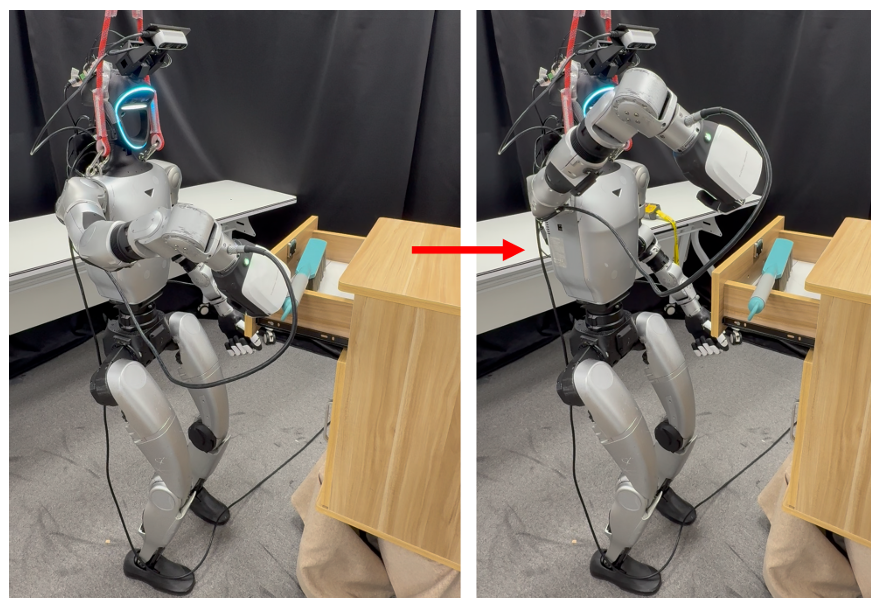
项目概述:中山大学团队针对具备空间感知能力的仿生人形机器人全身操作任务展开研究,依托多智能体大模型的空间感知与动作生成能力,提出一种具备泛化能力的人形机器人移动-操作一体化框架:主动空间大脑 + 通用化动作小脑,大脑主动感知环境空间信息,完成任务规划与子任务拆分决策;小脑依托前序模块的决策结果生成机器人可用动作,无需针对具体任务采集专属的真机数据。
项目主页:https://leungchaos.github.io/Humanoid-Whole-Body-Manipulation-via-Active-Spatial-Brain-and-Generalizable-Action-Cerebellum/
项目成果:
不仅提出了一套在宇树 G1 上验证有效的全身操控框架,更在于它揭示了人形机器人领域一个更深层的范式转移:从"数据驱动"到"知识驱动"。



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877