



Dex3-1 三指灵巧手专为精密操作打造。整手搭载 33 个触觉传感器,力位混合控制精准灵敏,可实时感知压力、温度等数据,指尖重复定位精度 ±2mm,能完成各类复杂精细操作。适配宇树 G1 人形机器人,深度适配具身 AI、工业精密操作、科研教育等多元场景。
| 自重 | 710g |
| 灵巧手自由度 | 7个(拇指 x 3+食指 x 2+中指 x 2) |
| 指尖重复定位精度 | ±2mm |
| 负载情况 | 最大重量为500g |
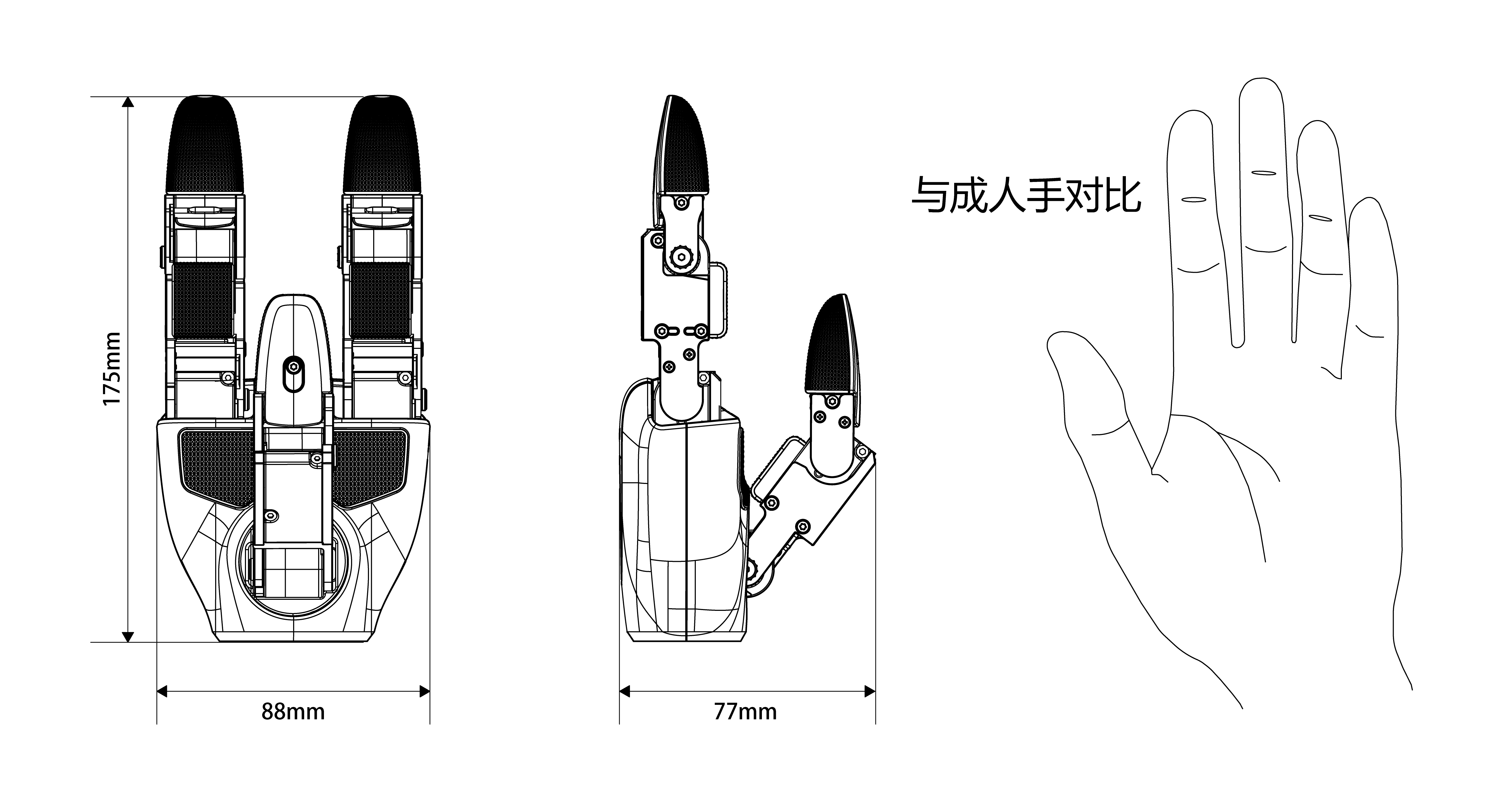
| 尺寸 | 175mm x 88mm x 77mm |
| 传动机构 | 6个微型无刷力控关节直驱+1个微型无刷力控关节齿轮传动 |
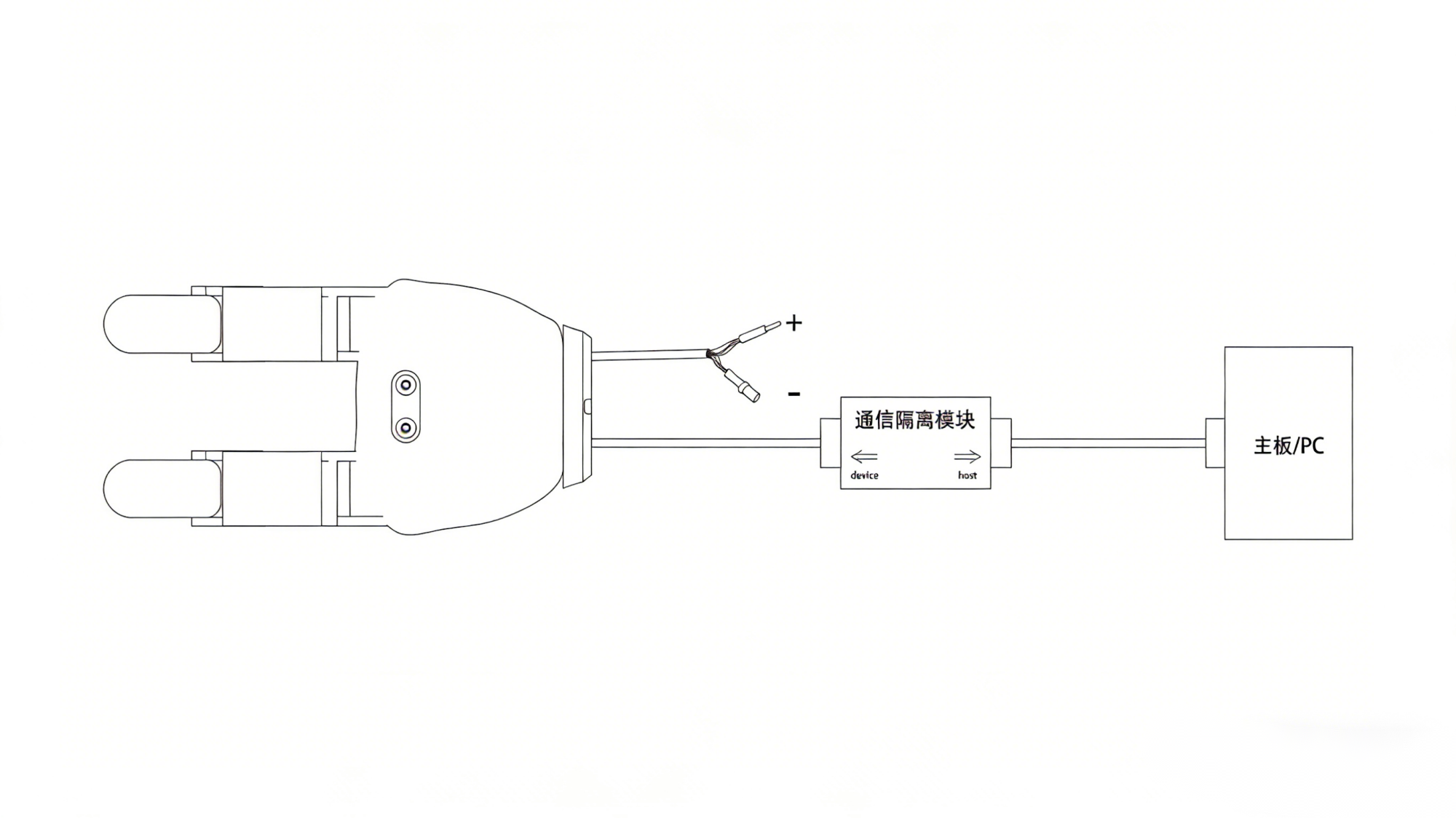
| 工作电压 | 12~58V |
| 阵列传感器数量 | 9个(共33个压力传感器) |


 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 商务合作:18062020215
销售咨询:18062020221
服务热线:027-87522899
 |
 |
































