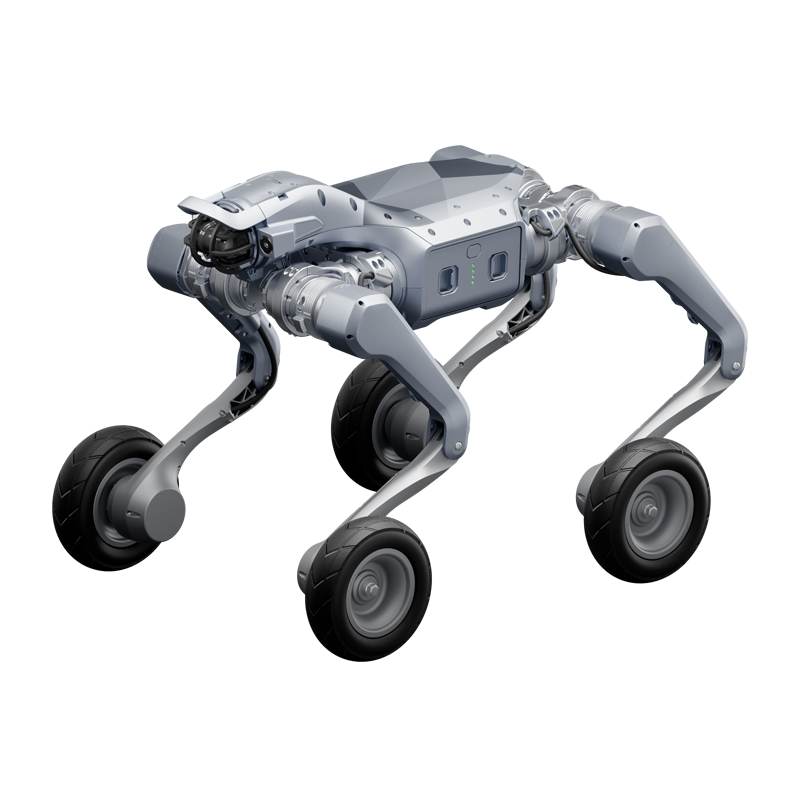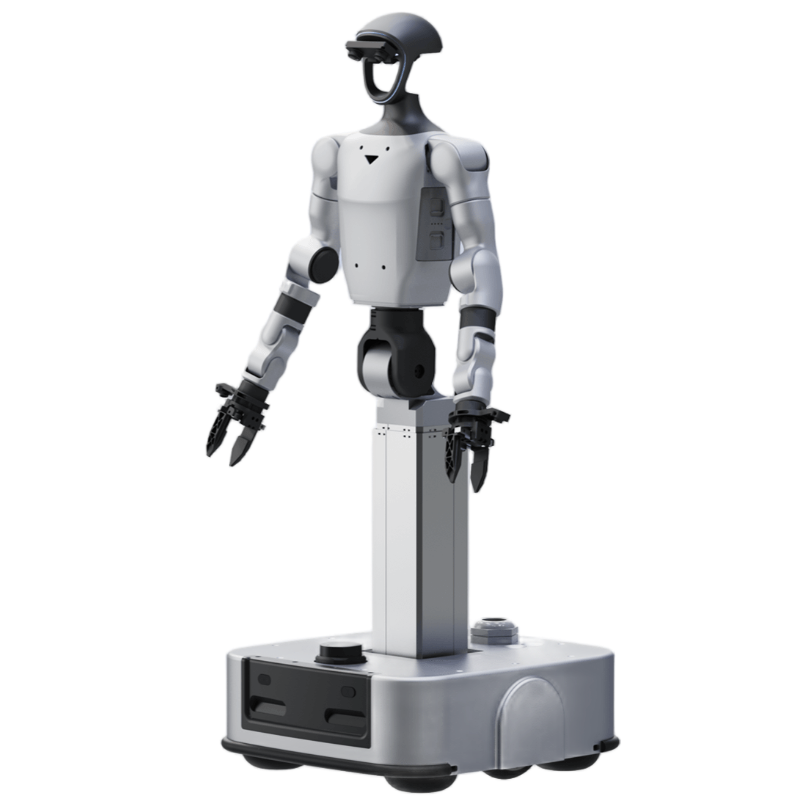
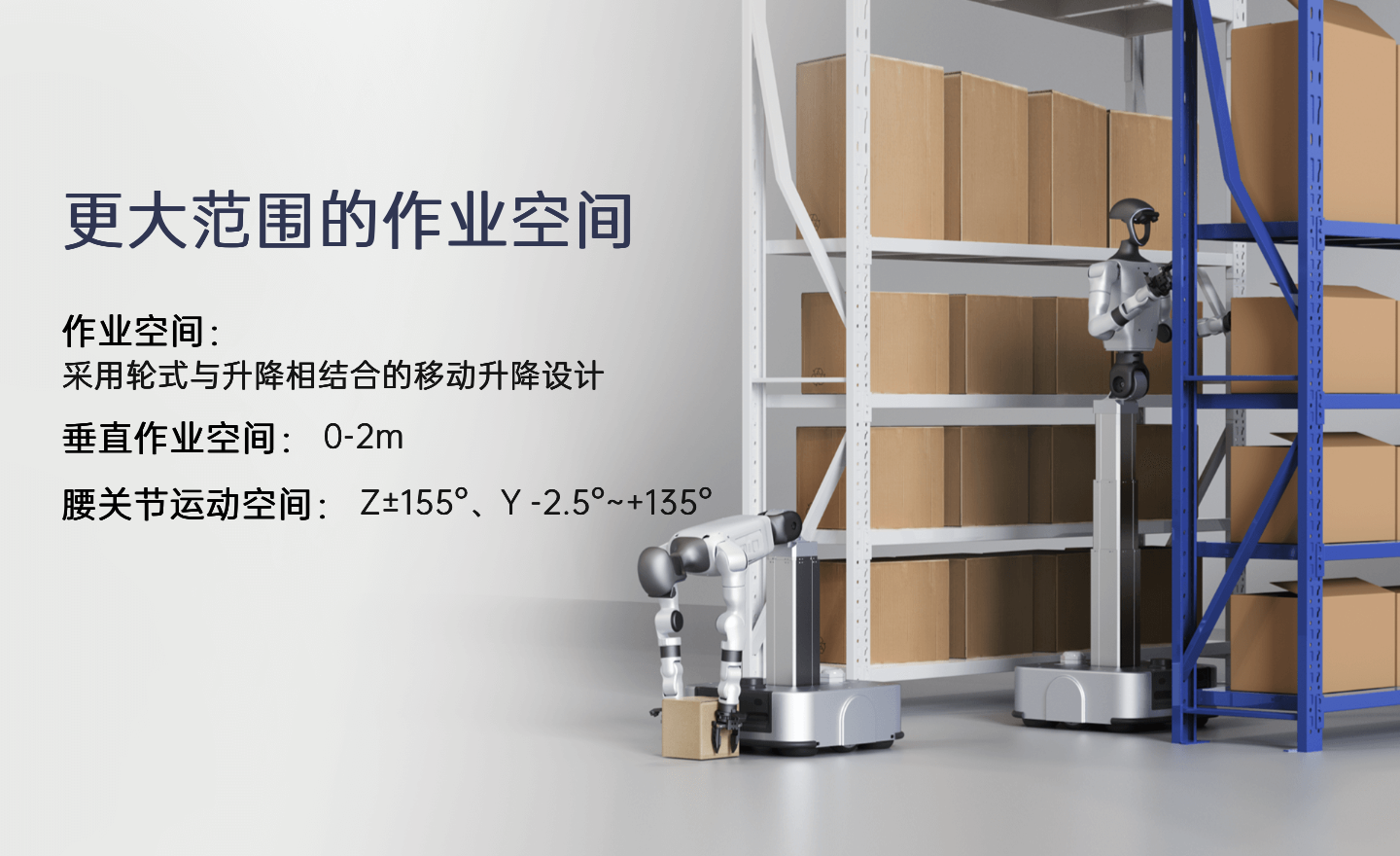
宇树G1-D旗舰版是宇树科技专为高效数据采集与AI模型训练打造的轮式人形机器人平台,基于G1系列进化而来,以高自由度、大作业空间与全栈工具链,赋能工业、科研与服务场景的智能化落地。整机19个自由度(不含末端),单臂7自由度,腰部支持±155°超大转角,单臂最大负载3kg,可完成抓取、装配等精细操作,控制精度达0.1毫米级。创新轮式+升降设计,身高可调1260-1680mm,垂直作业空间0-2米;旗舰版配备差分驱动轮式底盘,最高移动速度1.5m/s,支持原地360°旋转,适配高低差场景与大范围移动需求。头部高清双目相机+手部视觉相机组成手眼协同系统,结合深度视觉与力控感知,实现环境建模、动态避障与精准操作;开放高算力边缘AI模块,支持与大模型联动,具备自然语言交互与智能任务规划能力。集成数据采集、标注、模型训练与推理工具链,支持分布式训练与主流开源框架,60Hz高频采集、<100ms低延迟遥操作,为机器人学习与算法迭代提供完整闭环。30Ah大容量电池,续航约6小时;末端支持二指夹爪、三指/五指灵巧手(含触觉版)等模块化配件,可快速切换场景,适配工业装配、仓储物流、家庭服务、科研教学等多元应用。


| 本体 |
|
| 数采工具 |
|
| 模型训练和推理工具 |
|
| 产品参数 |
|

Dex1-1 灵巧夹爪专为具身 AI 应用打造,以轻量紧凑设计实现强悍操控性能,仅 550g重,90mm 超大行程搭配 0.1mm 指尖定位精度,操作精准度拉满。适配宇树 G1/H1/R1 等人形机器人

拥有11个自由度,其中6个电机。自重383g,尺寸16*7.6厘米,单手可负载20Kg。0.1毫米的操作精度,握力可达50N,有三款颜色可选分别是深空灰、流光银和晨曦金。通讯接口RS485
手指关节12个,其中有6个电机。最大负重3Kg,自重540g,拇指最大抓握力15N,四指最大抓握力10N。抓握力分辨率0.5N,±0.20mm重复定位精度。控制接口RS485。可选配2个自由度手腕关节。

宇树自研五指灵巧手,16个主动自由度和4个从动自由度。自重1100克。四指侧摆±22°,指尖重复定位精度±1mm,指尖力10N,最小抓握直径10mm。最大负重3.5kg。







 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 商务合作:18062020215
销售咨询:18062020221
服务热线:027-87522899
 |
 |