NVIDIA、斯坦福大学【多机器人协作】
客户名称:NVIDIA、斯坦福大学
应用类型:多机器人协作
项目时间:2025年12月
应用产品:人形机器人G1
应用类型:多机器人协作
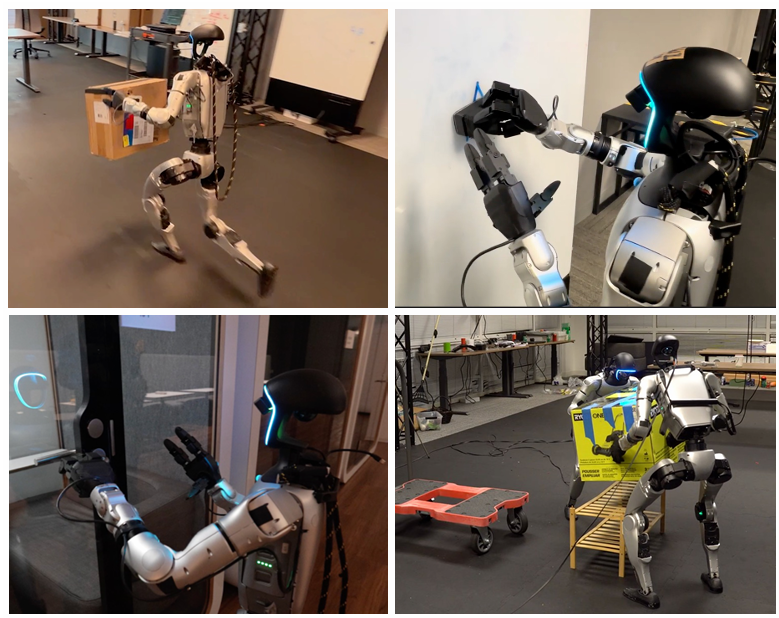
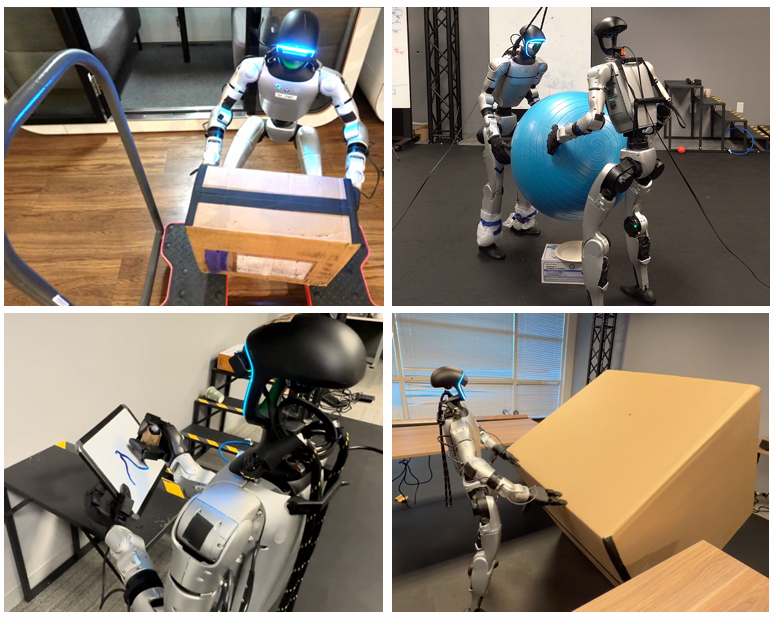
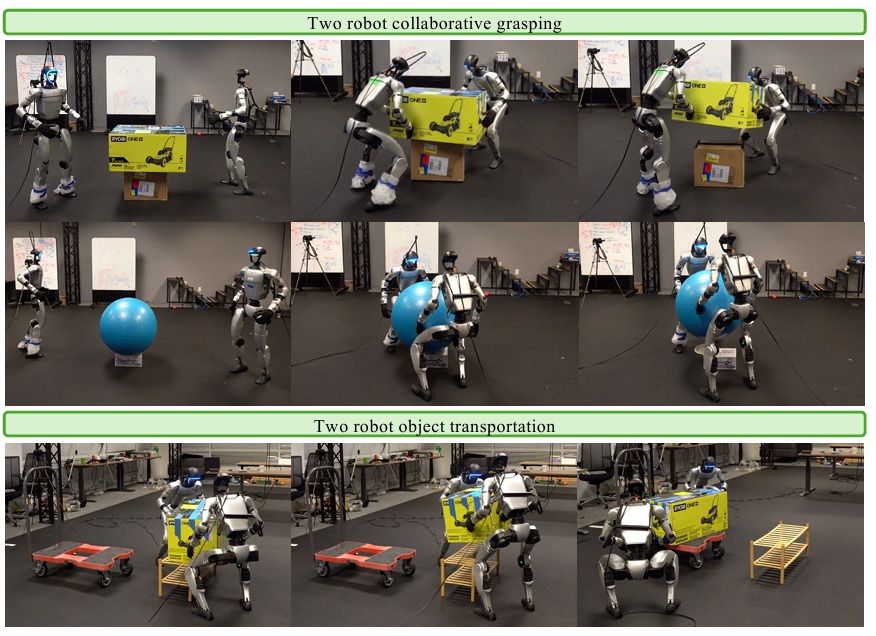
项目概述:NVIDIA、斯坦福大学等联合提出的CHIP(Adaptive Compliance Humanoid control through hIsight Perturbation),是一款轻量可插拔的柔顺控制模块。它无需大规模数据增强或奖励调优,即可为现有运动跟踪框架注入末端执行器级别的自适应柔顺能力,让人形机器人在保持跑步、舞蹈等敏捷运动的同时,流畅完成擦拭、开门、多机器人协作搬运等强力接触类任务,成功解决 “敏捷运动的高刚度与接触操作的变柔顺” 难以兼容的核心痛点。
项目成果:
CHIP 的核心价值在于以极简设计突破 “敏捷与柔顺” 的矛盾,为现有运动跟踪框架快速注入自适应柔顺能力,让人形机器人从 “只能做敏捷运动” 升级为 “既能跑跳舞蹈,又能精准完成强力接触操作”。



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 

































