清华大学【全身协调控制】
客户名称:清华大学
应用类型:运动控制
项目时间:2026年1月
应用产品:人形机器人G1
应用类型:运动控制
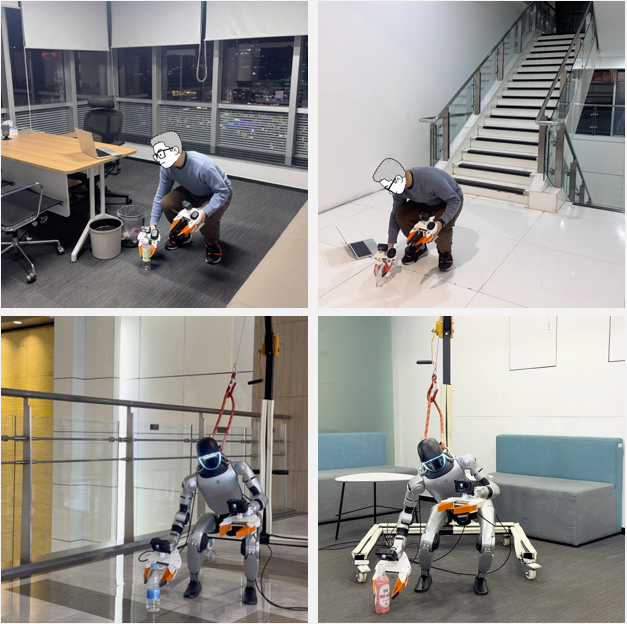
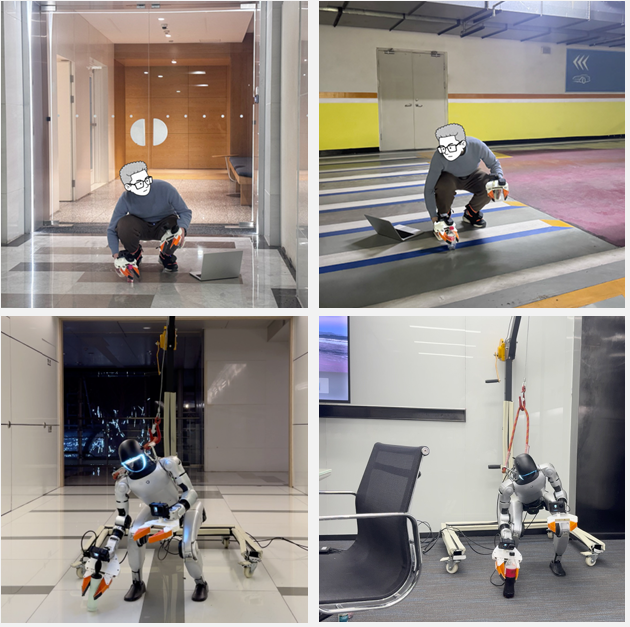
项目概述:在人类生活环境中,人形机器人需要像人类一样协调全身完成各类任务 - 下蹲拾取地面物体、双手协同拔剑、动态投掷物品等。然而,现有方法要么依赖复杂的强化学习奖励工程,要么需要专业人员远程操控机器人收集数据,不仅效率低下,还难以实现复杂的全身协调。为此,研究团队提出 HuMI(Humanoid Manipulation Interface)框架,通过便携硬件实现无机器人的数据收集,再经分层学习流程将人类动作转化为机器人可执行的技能,大幅提升数据收集效率与任务泛化能力。项目地址:https://humanoid-manipulation-interface.github.io
项目成果:
研究团队在人形机器人 G1 上开展全面实验,涵盖五个代表性全身操作任务(跪姿求婚、拔剑、投掷玩具、行走清洁桌面、下蹲拾瓶),从任务能力、泛化性、数据效率三方面验证框架有效性。HuMI 是技术突破创新,更降低了人形机器人全身操作技能的开发门槛。




 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877