北京大学【多模态实时控制】
客户名称:北京大学
应用类型:运动控制
项目时间:2025年12月
应用产品:人形机器人G1
应用类型:运动控制
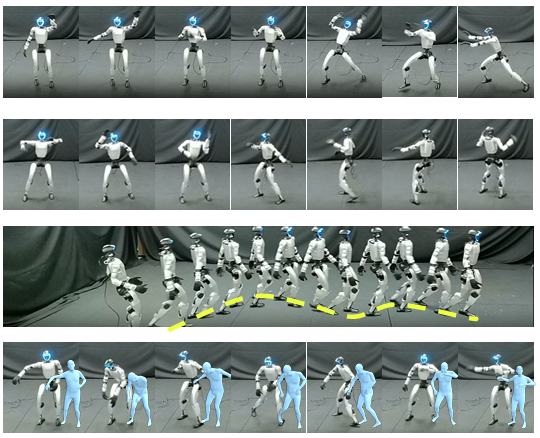
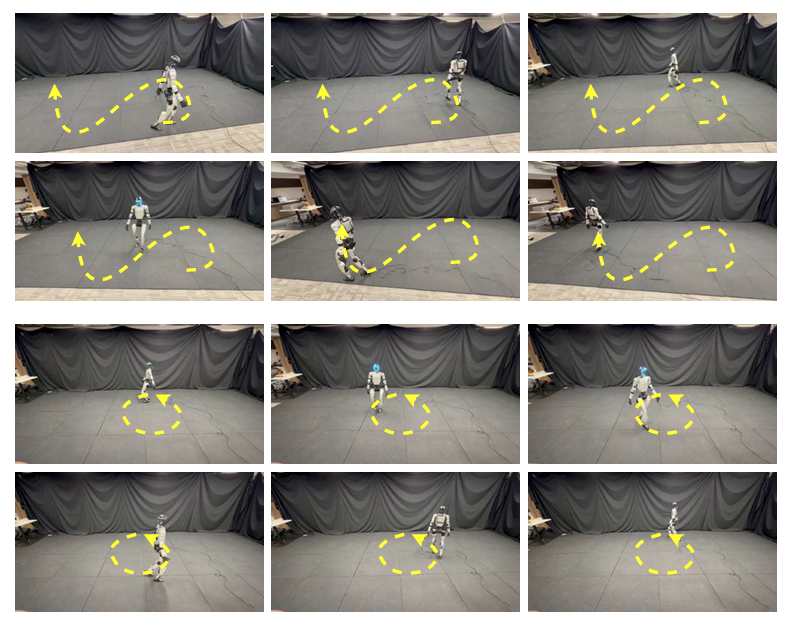
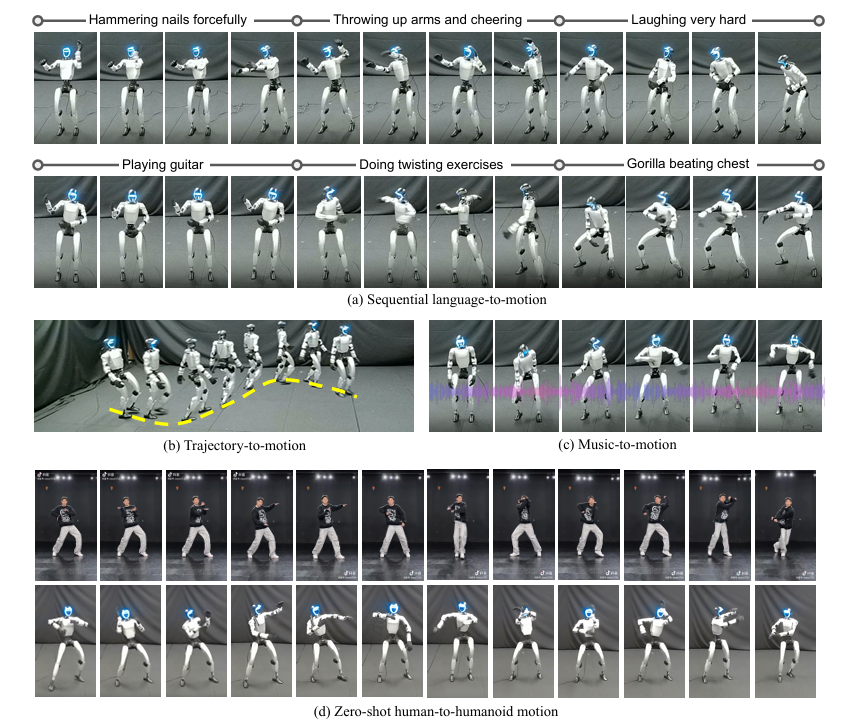
项目概述:北京大学等团队提出的UniAct(Unified Motion Generation and Action Streaming for Humanoid Robots),是一款面向人形机器人的多模态实时控制框架。它通过 “统一离散标记化 + 多模态大语言模型(MLLM)+ 因果流式解码” 的核心设计,将自然语言、音乐节奏、空间轨迹等异质输入转化为稳定可控的全身动作,响应延迟低于 500 毫秒,成功在 G1 机器人上实现多场景验证,大幅突破传统方法在跨模态适配与实时性上的局限。项目地址:https://jnnan.github.io/uniact/
项目成果:
UniAct 的核心价值在于构建了 “多模态统一理解 - 实时动作生成 - 精准执行” 的端到端链路,突破传统方法在跨模态适配与实时性上的双重瓶颈,为人形机器人在服务、娱乐、教育等场景的应用奠定基础。



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877