


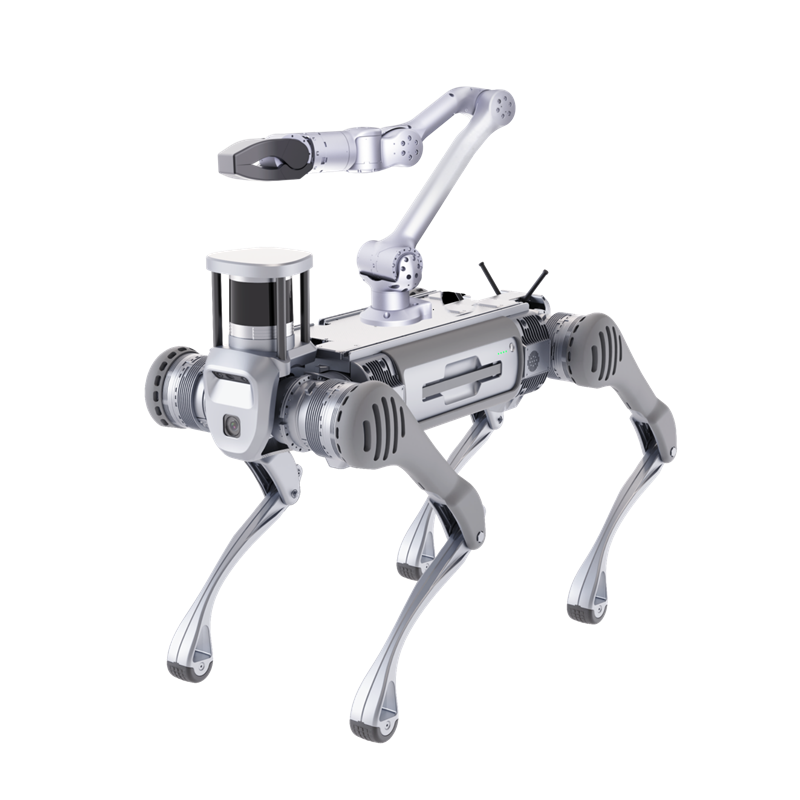
JT-D21是由工业级四足机器人与机械臂深度集成,打造高性能移动操作一体化平台。既具备强悍运动能力,高速稳定、越障与地形适应力强,可在工业、巡检、救援等复杂环境可靠通行。又搭配 6 自由度 机械臂,定位精准、力控柔顺,能完成抓取、操作、作业等精细任务,实现从 “自主移动” 到 “精准执行” 的能力升级。整机模块化设计,感知与算力配置完善,支持二次开发与末端工具拓展,可广泛应用于工业巡检、设备操作、科研开发、应急探测等场景,兼顾移动性、操作性与实用性,是高性能四足移动操作的成熟解决方案。



| 站立尺寸 | 约 1098mm×450mm×1385mm |
| 站立负载 | ≥ 120kg |
| 攀爬能力 | 正向爬上和爬下高度 40cm 台阶 |
| 奔跑速度 | > 6m/s |
| 末端负载 | ≥3kg |
| 重量 | 约65kg |
| 持续行走负载 | > 40kg |
| 楼梯行走能力 | 最大台阶高度 20~25cm |
| 斜坡行走能力 | > 45° |
| 最大臂展 | 740mm |





 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |































