通用人工智能国家重点实验室【运动控制】
客户名称:通用人工智能国家重点实验室【运动控制】
应用类型:运动控制
项目时间:2026年2月
应用产品:人形机器人G1
应用类型:运动控制
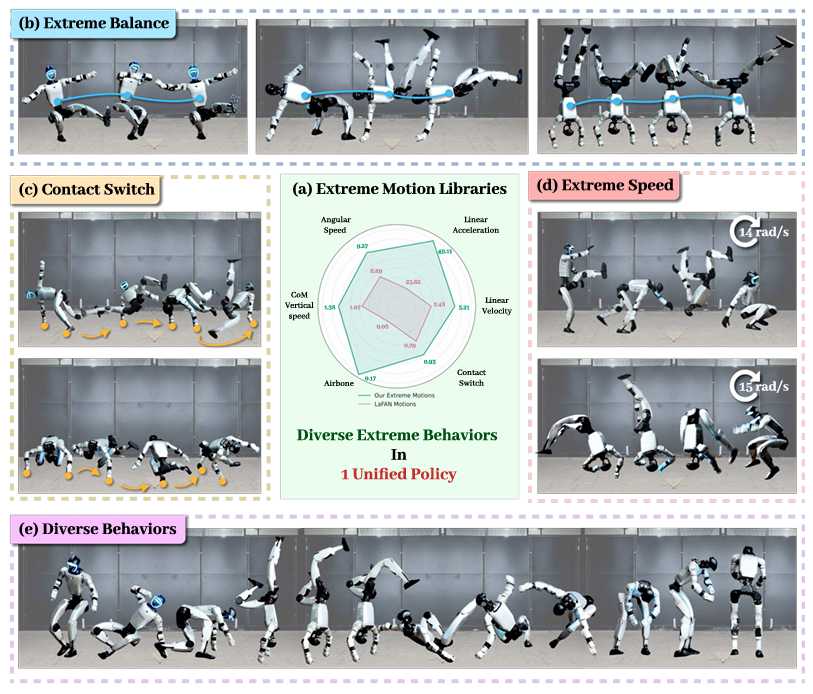
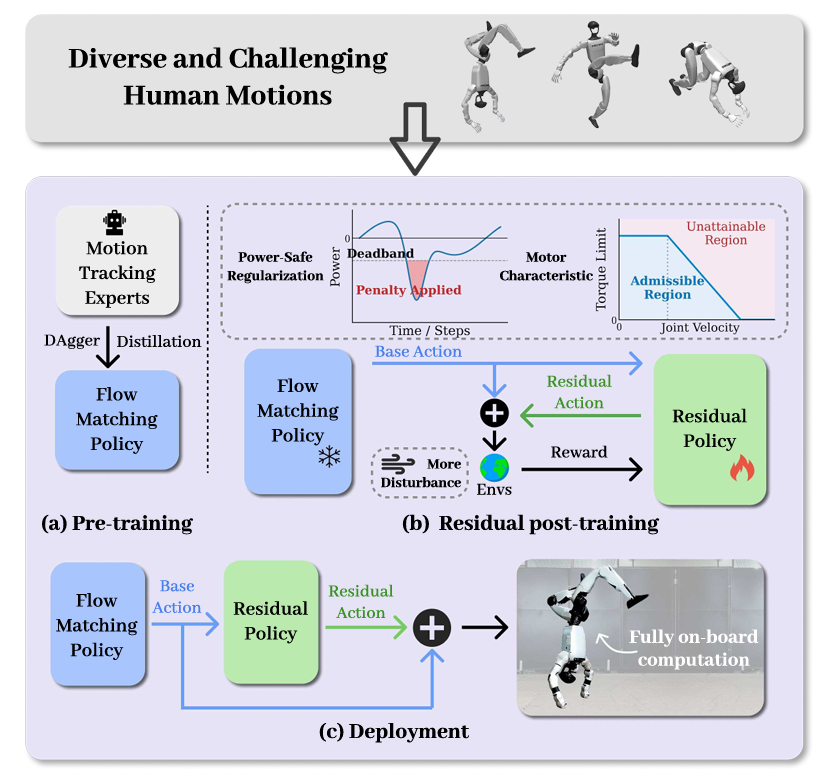
项目概述:北京通用人工智能研究院研究团队提出 OmniXtreme 框架:一套专为高动态、大规模、高难度动作设计的统一控制方案。它通过 “流匹配预训练 + 驱动感知残差微调” 的两阶段 pipeline,让单个策略就能稳定复现近 60 种极限动作(空翻、侧手翻、后手翻、托马斯回旋、地板舞、街舞连招等极限动作),在真实机器人上整体成功率高达 91.08%,真正打破了保真度随规模扩大而崩溃的魔咒。项目地址:https://extreme-humanoid.github.io/
项目成果:
OmniXtreme 是第一个真正解决高动态人形机器人 “保真度–可扩展性权衡”的框架,统一策略就能驾驭海量极限动作,不再需要分动作、分场景策略,真机可直接跑空翻、街舞、特技等高难度动作,且稳定、安全



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877