


“京天机器人已经累计服务2127位高校用户。专注提供科研,教学,比赛和展示等方案。并在定位导航、人机协作、危险场景作业、多机协作、机器人控制和分析、勘测、机器视觉运动目标跟踪、智能机器人仿真与虚拟教学、人工智能/智能机器人实验室建设、机器人竞赛等多个领域拥有完整落地案例”

当四足机器人在复杂地形执行物资运输、搜索救援等任务时,维持其自身稳定性是一个巨大挑战。特别是当负载具有“主动性”和“动态性”时——例如在机器人背部加装一个正在作业的机械臂
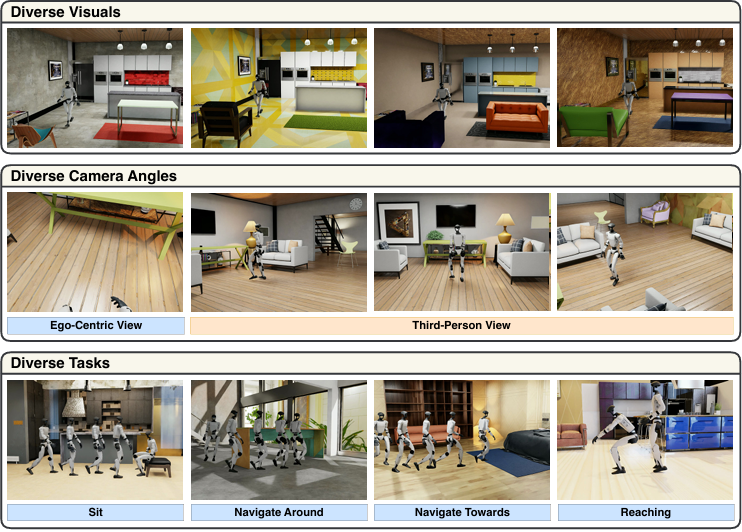
在人形机器人控制领域,实现兼具语义理解与动态适应性的全身控制一直是具身智能的关键挑战。加州大学伯克利分校联合多国研究机构提出的LeVERB(Latent Vision-Language-Encoded Robot
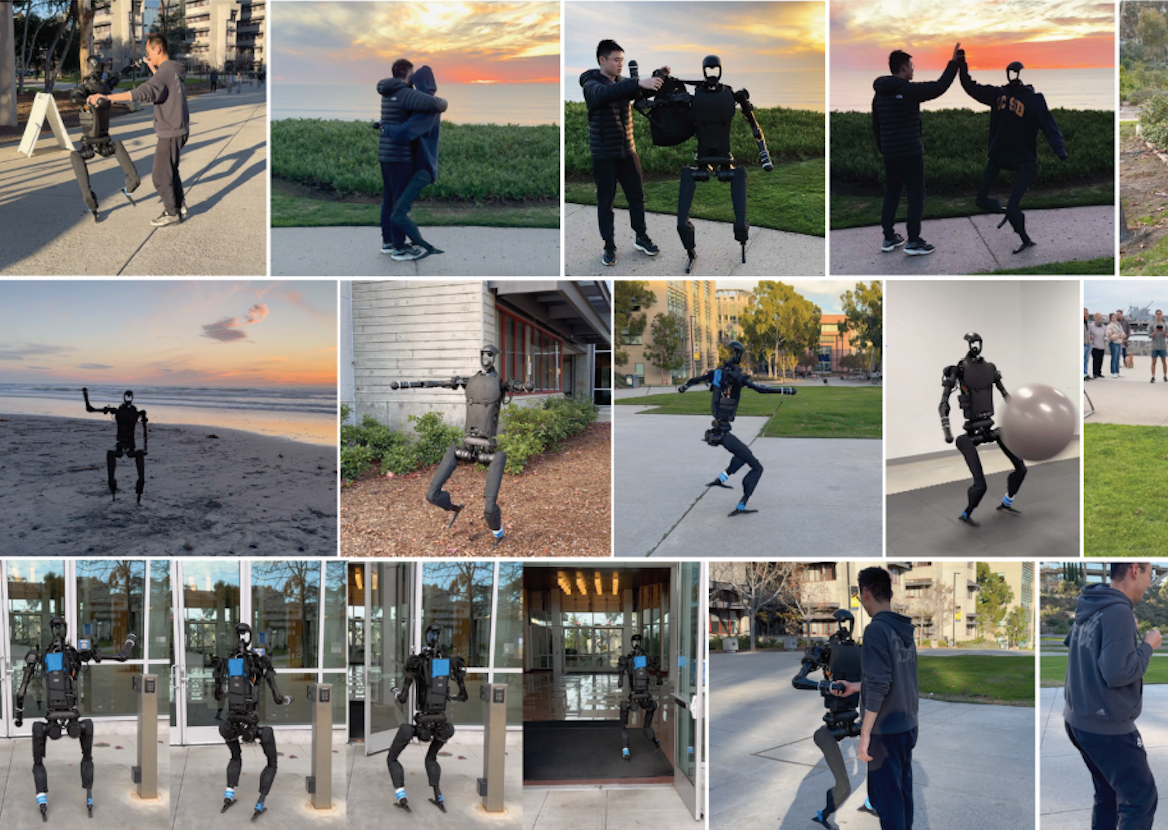
来自UCSD(加州大学圣地亚哥分校)全华人团队提出一种特别的全身控制策略(ExBody),能对人形机器人进行全身控制。策略主要训练人形机器人上半身,下半身则专注于负责维持稳定。

卡内基梅隆大学的研究团队近日发表了一项创新研究,该团队开发出了一个实时人对人形机器人(human to humanoid,简称H2O)的全身遥控系统。值得一提的是,实验中的人形机器人为Unitree
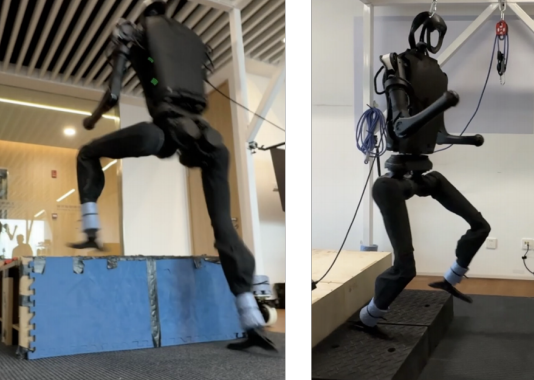
清华信息交叉研究院训练强化学习策略,小成本让人形机器人H1在高台上跳跃、跳过障碍、长距离跳台等。

深圳技术大学多智能体协同实验室建立于2023年,实验室研究方向主要为机器人视觉伺服、移动机器人定位与导航、智能机电系统、人-机-环境交互技术。

中国科学技术大学智能机器人化学家实验室于2018年10月建立,实验室发展融合人工智能与大数据技术的量子化学方法,聚焦于复杂体系内电子运动模拟,研究在多个物理与化学应用领域。

华中科技大学光学与电子信息学院吴国安课题组长期从事电子材料与元器件的教学和科研工作。自2001年起,带领全所人员承担了多个军用电子元器件的研发工作,建立了微波技术应用研究所,

同济大学机器人与人工智能实验室(RAIL)始于1990年,是国内最早从事机器人与人工智能方面研究的实验室之一。主要从事工业机器人、自主移动机器人(不依赖磁导航的全自主智能移动机器

用户主要研究方向为工业机器人、协作机器人、巡检抓取一体化无人机、智能移动机器人、特种攀爬机器人等

自主系统与网络控制教育部重点实验室成立于2013年,实验室有丰富的科研设备,包含了网络环境下自主系统的信息感知、获取、处理研究平台等。
 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |
































