加州大学伯克利分校【人形机器人全身控制】
客户名称:加州大学伯克利分校
应用类型:人形机器人全身控制
项目时间:2025年6月
应用产品:人形机器人G1
应用类型:强化学习
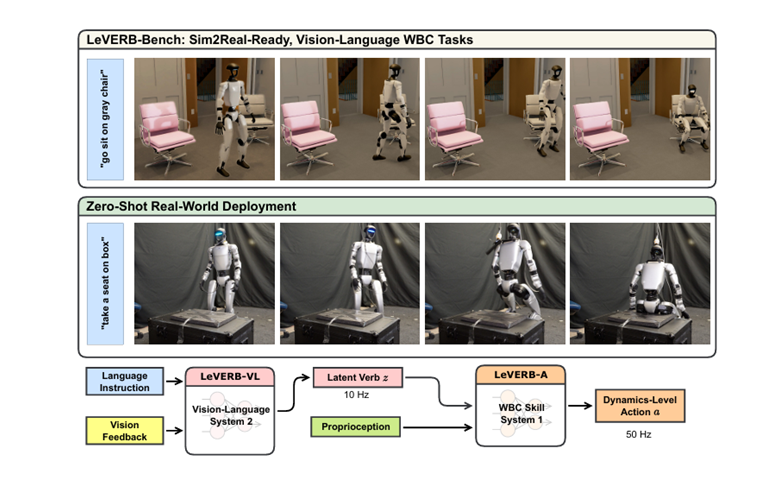
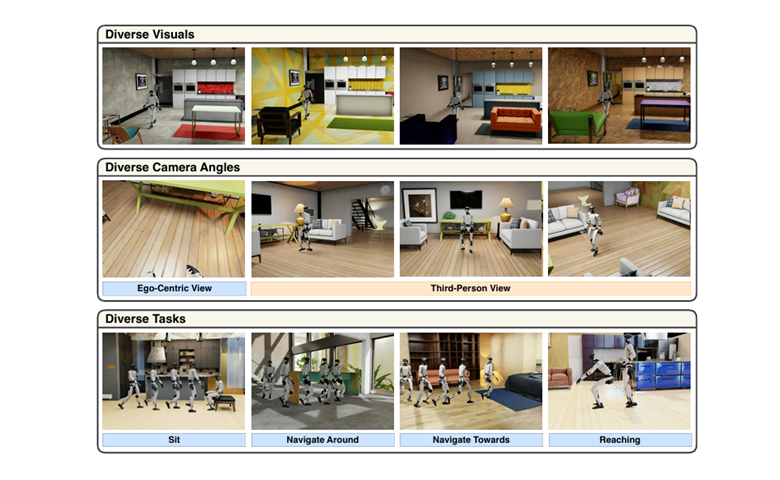
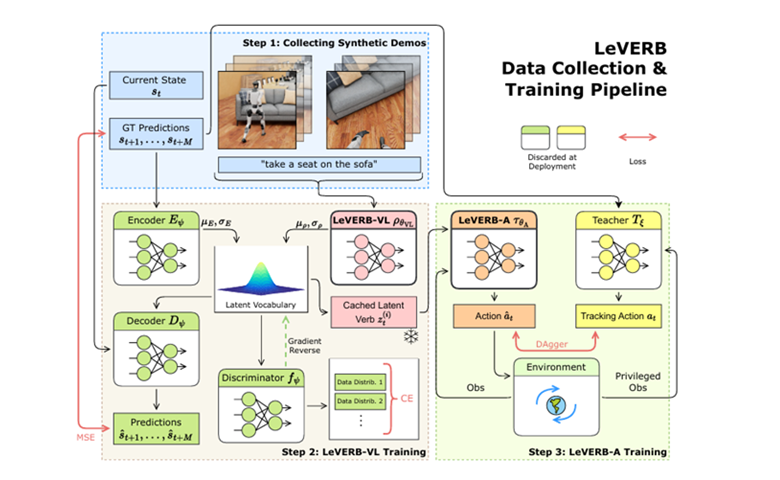
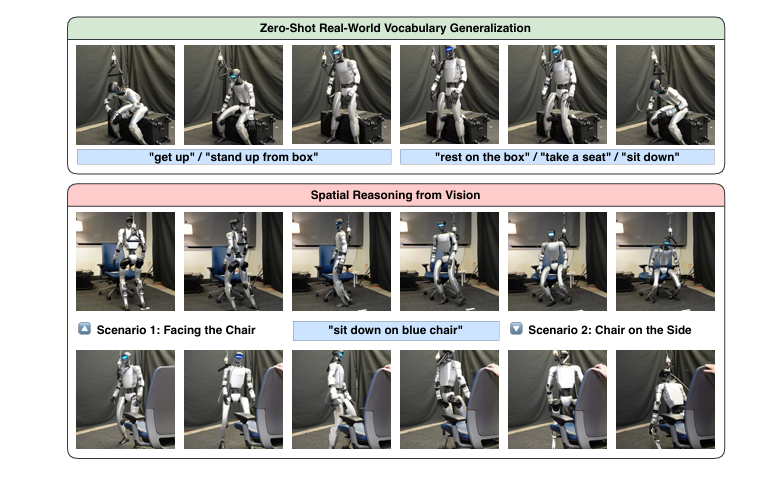
项目概述:在人形机器人控制领域,实现兼具语义理解与动态适应性的全身控制一直是具身智能的关键挑战。加州大学伯克利分校联合多国研究机构提出的LeVERB(Latent Vision-Language-Encoded Robot Behavior)框架,通过分层潜变量指令跟踪机制,首次实现了视觉 - 语言驱动的人形机器人全身控制,为机器人从仿真到真实环境的零样本迁移提供了突破性解决方案。
项目成果:
通过“潜变量语义编码 + 动力学分层控制”的范式,打破了传统 VLA 模型在人形机器人控制中的局限。其核心创新在于将自然语言指令转化为可计算的潜变量约束,并通过双系统架构解耦语义推理与动态控制。实验表明,该框架不仅在仿真中实现高效学习,更首次在真实人形机器人上验证了视觉 - 语言驱动的全身控制零样本迁移,为家庭服务、工业巡检等场景的具身智能应用奠定了基础。



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877