华中农业大学【强化学习】
客户名称:华中农业大学
应用类型:强化学习
项目时间:2026年3月
应用产品:四足机器人Go2
应用类型:强化学习
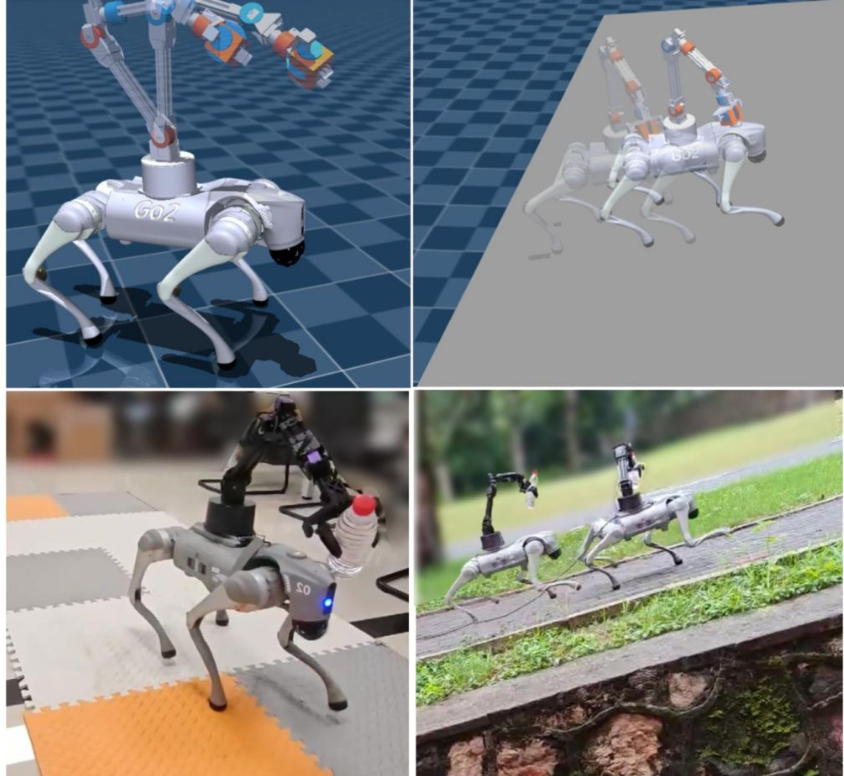
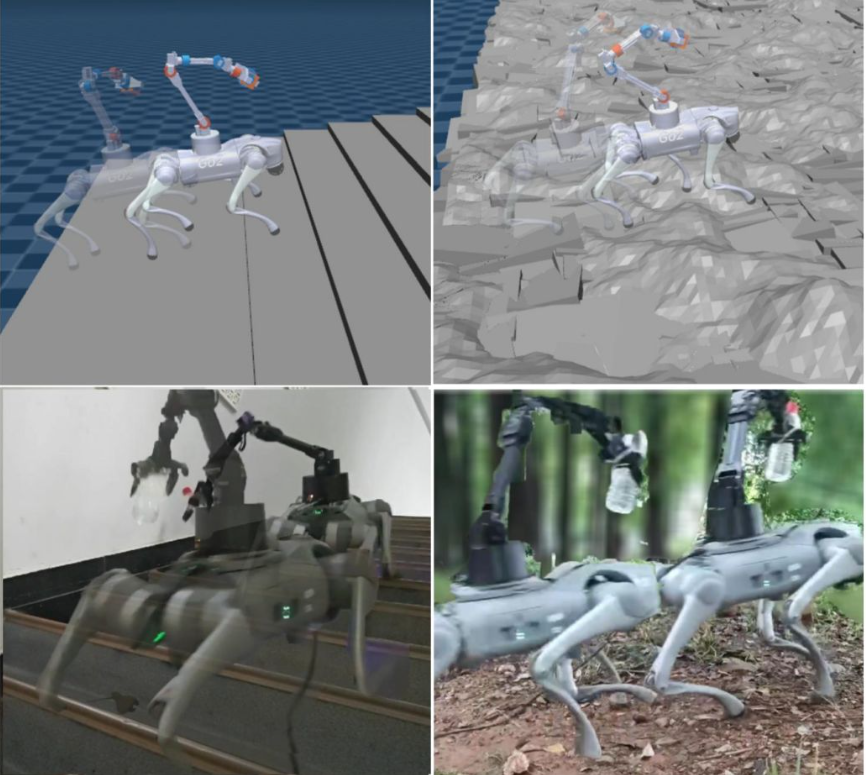
项目概述:当四足机器人在复杂地形执行物资运输、搜索救援等任务时,维持其自身稳定性是一个巨大挑战。特别是当负载具有“主动性”和“动态性”时——例如在机器人背部加装一个正在作业的机械臂,其质量分布和质心会随着机械臂的运动实时发生变化。这种主动负载产生的动态扰动,与复杂地形引起的姿态扰动叠加,形成了复杂的“地形-负载”双重扰动。
项目成果:
研究团队提出一种主动动态负载建模方法及基于动力学模型的强化学习框架,首次对主动动态负载建模,利用逆动力学模型学习并捕获主动负载的动态特征(如关节位置、速度和力矩等),从而实现对未知负载扰动的隐式建模。同时,方法引入前向动力学模型以预测环境地形的变化,通过这种双动力学模型的协同作用,机器人能仅依靠本体感受信息,在运动中同步感知地形扰动并预测负载干扰,实现实时的平衡控制优化。



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 

































