香港大学【机器人控制】
客户名称:香港大学
应用类型:运动控制
项目时间:2025年11月
应用产品:人形机器人G1
应用类型:运动控制
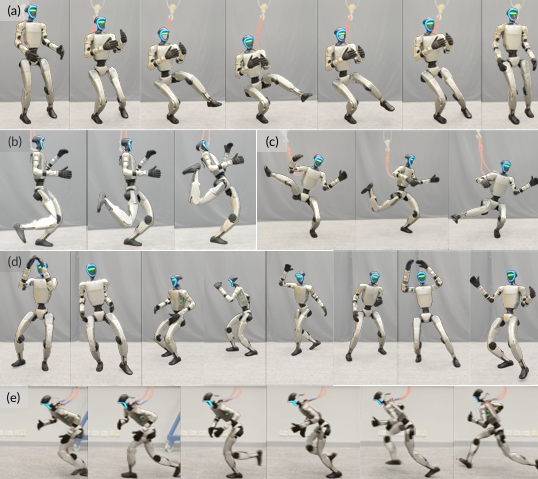
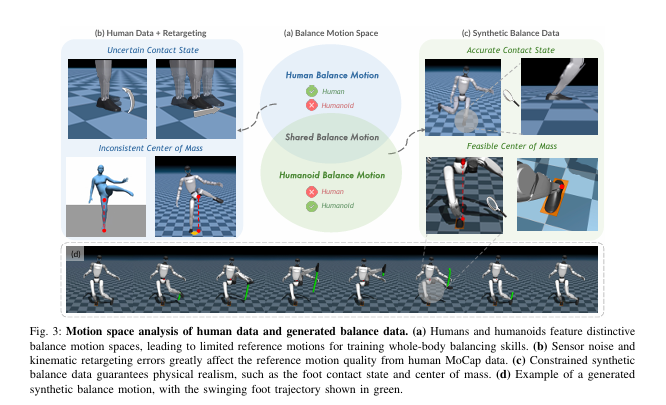
项目概述:人类能在动态运动与精准平衡间无缝切换 - 跑步时灵活调整姿态,单腿站立时稳如磐石。但现有人形机器人控制方法往往难以兼顾这两种能力,要么侧重敏捷动态技能而牺牲稳定性,要么专注平衡控制而缺乏运动灵活性。为此,研究团队提出 AMS(Agility Meets Stability)框架,通过异构数据融合、混合奖励设计与自适应学习策略,训练出单一通用政策,让机器人既能完成舞蹈、跑步等动态动作,又能实现 “叶问蹲” 等极端平衡姿态,甚至对未见过的平衡动作具备零样本泛化能力。
项目成果:
研究团队在 G1 人形机器人上进行了全面实验,涵盖模拟验证与真实硬件部署,通过与 OmniH2O(通用运动跟踪框架)、HuB(平衡专项框架)的对比,验证了 AMS 的综合性能优势。AMS不仅实现了敏捷与稳定的协同,更构建了一套通用的人形机器人控制框架。



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877