清华大学【感知强化学习框架】
客户名称:清华大学
应用类型:强化学习
项目时间:2026年1月
应用产品:人形机器人G1
应用类型:强化学习
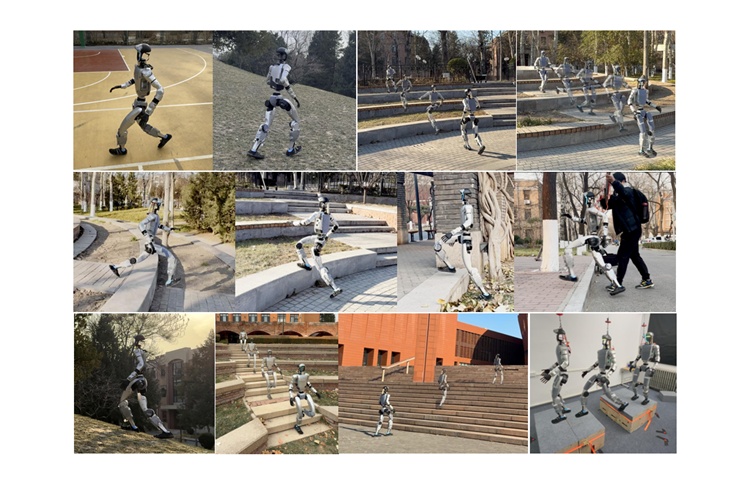
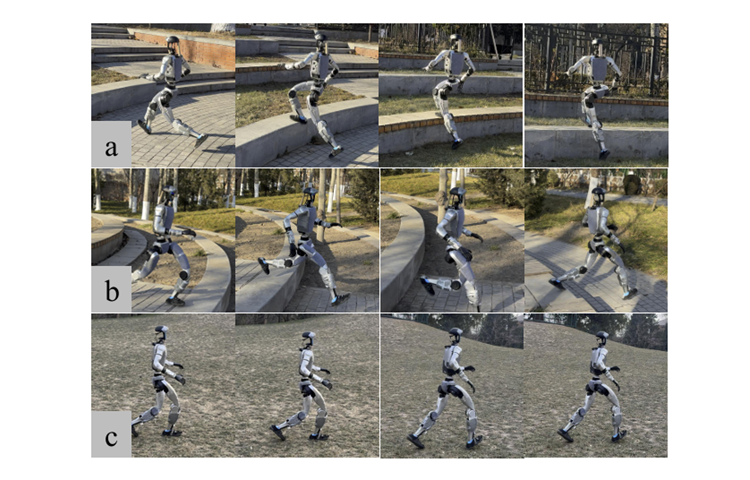
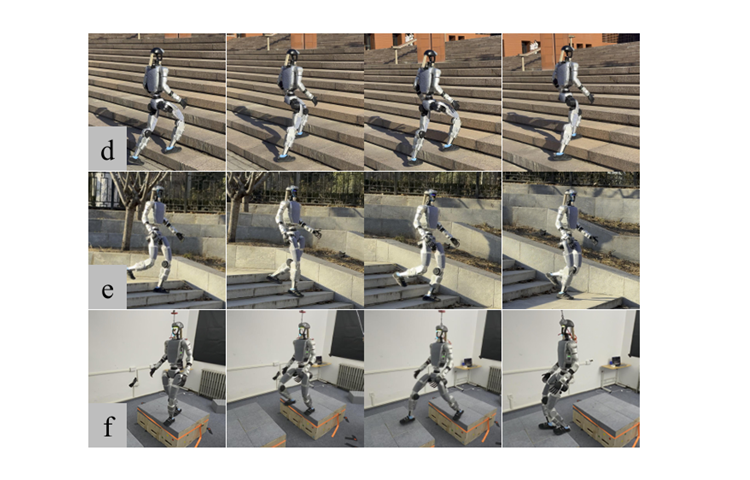
项目概述:清华大学等团队提出的Hiking in the Wild,是一款面向复杂非结构化环境的人形机器人敏捷行走框架。它以 “端到端感知 - 控制” 为核心,通过深度图像实时感知地形,结合地形边缘安全机制与自适应指令生成策略,让人形机器人实现零样本仿真到现实迁移,在室内外复杂地形(楼梯、斜坡、间隙、高台)中以最高 2.5 m/s 的速度稳健行走,突破传统方法在动态性、安全性与泛化性上的三重局限。
项目地址:https://project-instinct.github.io/hiking-in-the-wild/
项目成果:
构建了 “感知 - 安全 - 指令” 三位一体的端到端框架,突破传统方法在复杂环境中的动态性、安全性与泛化性瓶颈,为人形机器人在野外救援、工业巡检等场景的应用奠定基础。



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 

































