



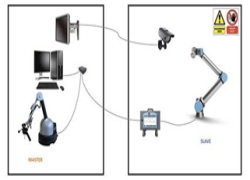
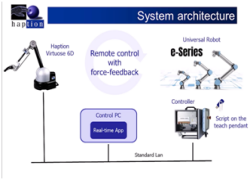
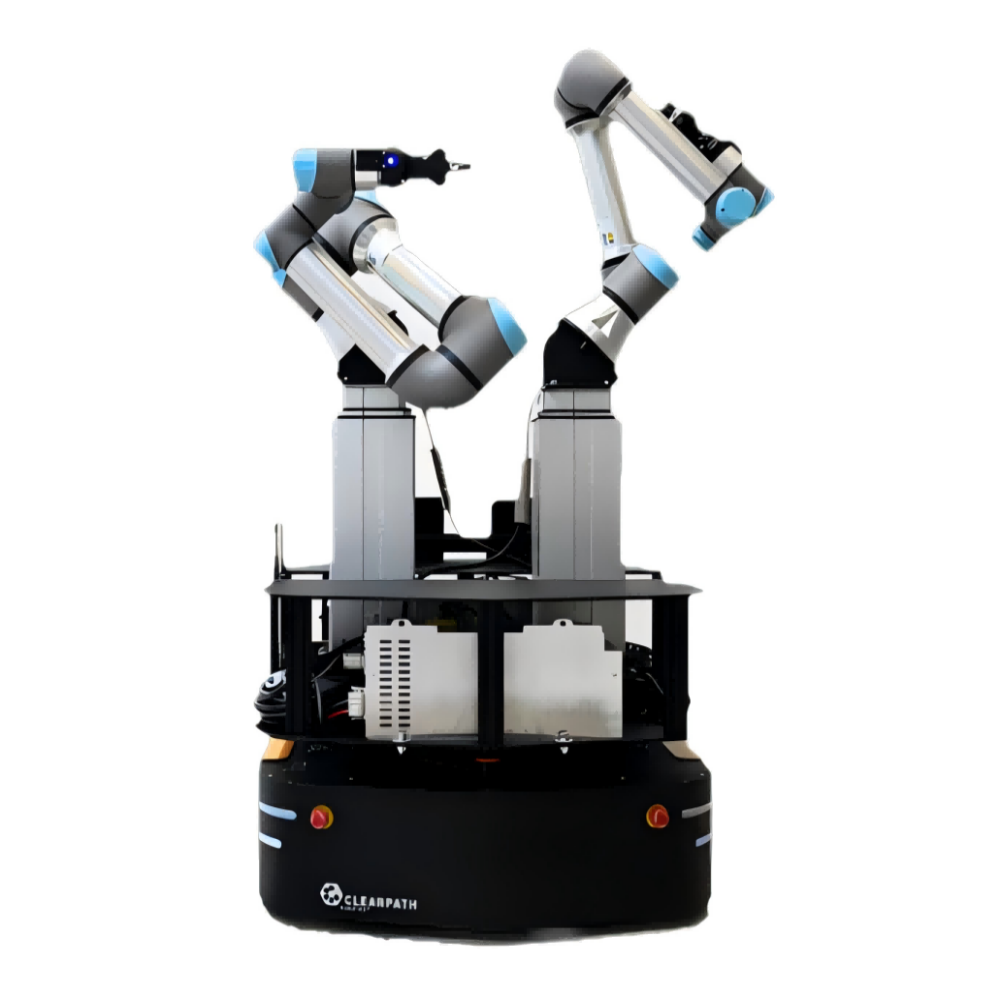
Virtuose 6D 是一种带有 6 个自由度的力反馈系统,是特别为虚拟实境工作环境而设计。由于其大范围的工作空间以及高承载力,能与 CAD 模型进行互动模拟。尤其适合于以下的科学研究:人机工程分析,物理互动研究,装配模拟,项目检测,远程遥操作,手势操作。 适用领域:人机工程学分析,功能测试,装配/拆卸,工作环境仿真,操作人员培训, 医疗培训,远程外科手术等。

| 机械臂关节数 | 6关节 |
| 机械臂典型TCP速度 | 1 m/s |
| 夹持器行程 | 0-106mm |
| 夹持器精确度 | 0.088° |
| 最大承重施力 | 31N |
| 连续扭矩(旋转) | 1 N.m |
| 最大控制刚度(旋转) | 30 Nm /rad |
| 关节旋转范围 | ±360° |
| 机械臂负载 | 10 kg |
| 机械臂重复定位精度 | ±0.05 mm |
| 夹持器负载 | 5 kg |
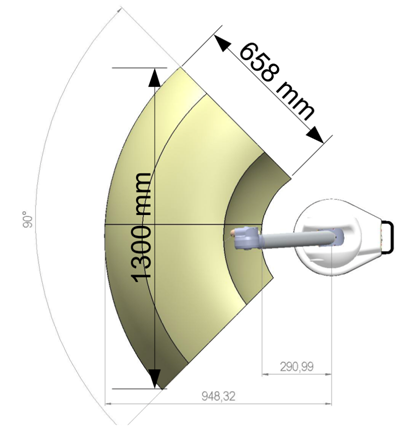
| 操控空间 | ≥1330×575×1020mm |
| 最大扭矩(旋转) | 3.1 N.m |
| 最大控制刚度(平移) | 从1800 N / m到8000N / m |
| 按键数 3 | (2个可编程) |

柔性机械臂

力传感协作机械臂






























 027-87522899
027-87522899 
