



Seed Robotics是一家成立于2015年的英国公司,专门从事机器人灵巧手的研究和解决方案,主要涉及人工智能、神经科学、心理学和认知科学领域。 旗下产品主要有:3指灵巧手RH2D,4指灵巧手RH7D,5指仿人1:1灵巧手SR-RH8D以及FTS触觉压力传感器系列。
了解更多
宇树科技H1人形机器人采用轻量化材料设计,整体重量只有47kg,整身拥有19个自由度,行走姿态轻盈稳健,尤为突出的H1腿部关节电机部分,峰值扭矩达到了360N·m,并且配合中空轴线和双编码器,全面对标特斯拉Optimus人形机器人。
了解更多

Agricobots的项目旨在开发一种被称为VinyA st-4030的专用葡萄园喷洒机器人。该机器人的设计目的是在以陡坡和潜在滑溜为特征的高要求和危险的景观中导航。在这样的环境中,自主操作发挥着关键作用,不仅在优化流程和降低成本方面,而且在降低拖拉机翻车和随之而来的人身伤害相关风险方面。
了解更多
多伦多大学和慕尼黑工业大学的学习系统与机器人实验室的项目旨在开发一种“服务员机器人”,能够平衡托盘上的物体,在动态环境中导航,避免碰撞,并成为顶级服务器。 他们的项目包括控制机器人在托盘上平衡物体的能力,同时在周围环境中导航,并像传统餐厅服务员一样避开障碍物。
了解更多
他们使用了一组Jackal UGV作为基础平台,安装各种传感器和Clearpath的OutdoorNav Autonomy软件,用于现场传感器融合、导航和目标识别。OutdoorNav用于精确定位和地理定位任务中多次机器人访问将识别和表征的物体。该专业机器人团队旨在合作开展浅层威胁的检测、分类和绘图程序。这些机器人被设计成敏捷、轻便,并针对特定任务进行了优化。
了解更多
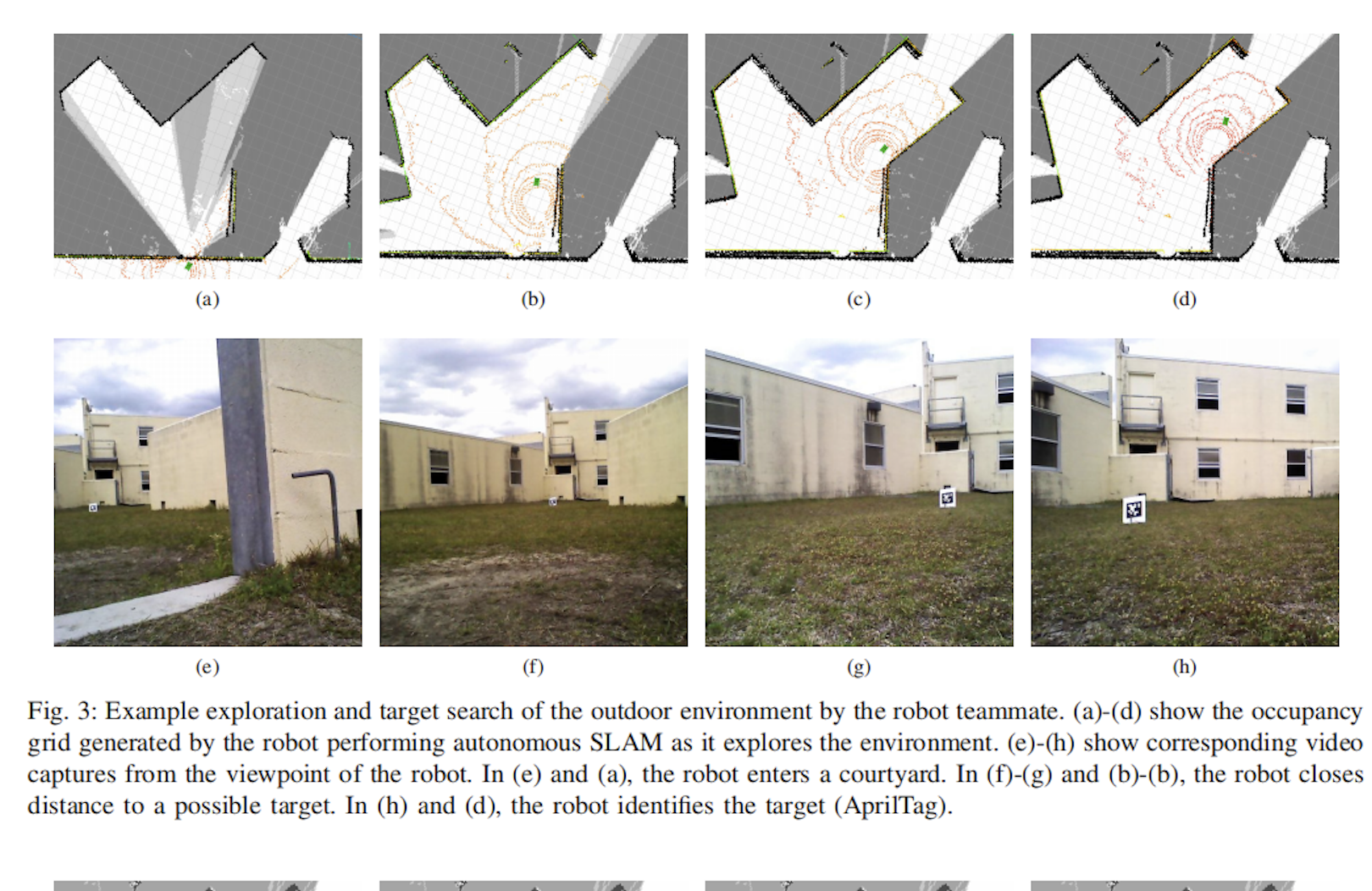
在野外环境中与人类并肩作战的机器人有可能大大提高人类队友的原位意识。我们在无仪器环境中的搜索任务中展示了这种能力,在无仪器的环境中,Jackal机器人识别和定位目标,并通过AR提供导航方向,将人类带到正确的目标。
了解更多
密西西比州立大学的一个团队正在调查使用无人地面车辆自动放牧和驾驶牛的可行性。旨在捕捉牛的自然行为,生成运动模式的计算机模型以了解牛群动力学,并开发放牛的自主行为。他们的最终目标是提供可以用于动物自主运动的算法,几乎没有人类干扰。
了解更多 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |
































