



虽然我们已经看到了深度神经网络已成功应用于机器人,扑克,棋盘游戏和基于团队的视频游戏等领域的强化学习(RL)成功,使这些方法解决实际问题的主要障碍是难以大规模收集在线数据。在线数据收集不仅耗时且昂贵,而且在诸如驾驶或医疗保健等对安全至关重要的领域中也很危险。
了解更多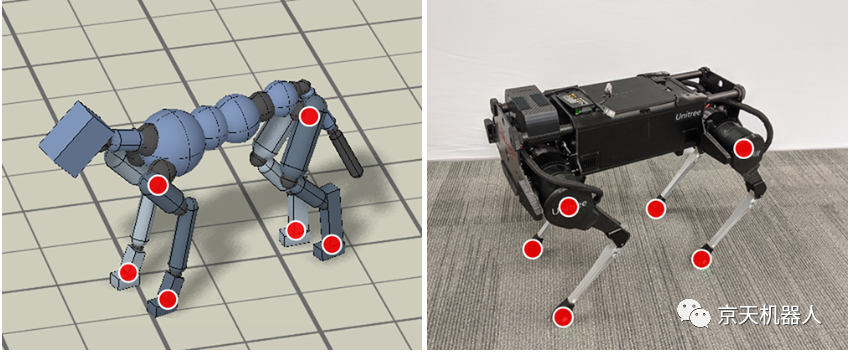
复现动物的多样化和敏捷性运动技能一直是机器人技术中的长期挑战。尽管手动设计的控制器已经能够模拟许多复杂的行为,但是构建这样的控制器涉及耗时且困难的开发过程,通常需要掌握每种技能的细微差别的大量专业知识。强化学习为自动化控制器开发中涉及的人工工作提供了一种吸引人的选择。
了解更多
Guy Zaidner和Mitch Pryor博士是得克萨斯大学奥斯汀分校的研究人员,他们开发了Vaultbot,一种基于Husky的双臂移动机器人,旨在提高在危险和不确定的环境中双臂移动机器人远程操作中的态势感知能力。
了解更多
通过观察他人来学习的能力是智力水平的最重要标志之一。人类尤其擅长此事,通常能够通过观察其他人来学习任务。因为我们不只是复制他人采取的行动。相反,我们首先想象自己该如何执行任务 。
了解更多
当您开始考虑实施机器人系统时,您可能会想到一些令人兴奋的想法。也许您确切地知道了要解决的问题,或者您已经对要构建的平台有了明确的了解。您很自然地想通过与机器人供应商联系何时将其变为现实,立即将您的想法付诸实践。
了解更多

小编在不久前得知加拿大Clearpath公司正在和微软公司合作,打算将ROS机器人操作系统应用在win10上。本月初在油管上看到了Clearpath公司发布的相关预告视屏,内心非常激动,这简直就Windows机器人用户的福音,ROS机器人操作系统的一次跨越式发展。话不多说,先让我们一起来看看在Windows平台下使用ROS来操作机器人的表现吧。
了解更多

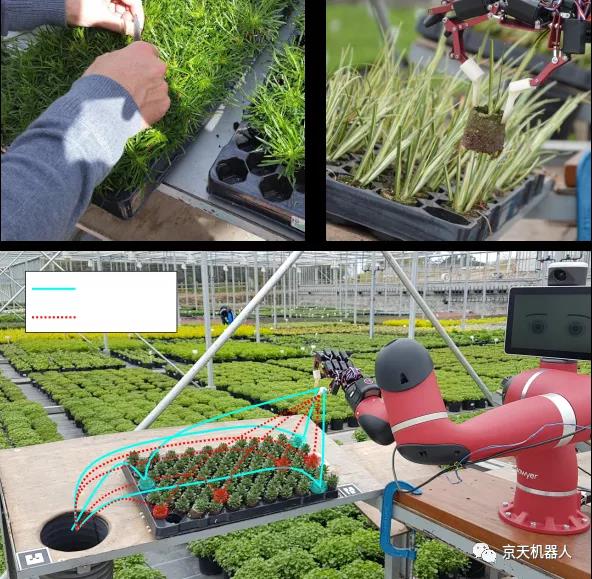
示教编程作为机械臂常见操作方式被人们所熟知。今天这篇文章向大家介绍几种新颖独特、非常有创造力的几种机械臂操作方式,希望这些成功的案例可以给大家带来灵感,通过这些方法去落地更多的产品。
了解更多 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 商务合作:18062020215
销售咨询:18062020221
服务热线:027-87522899
 |
 |
































