


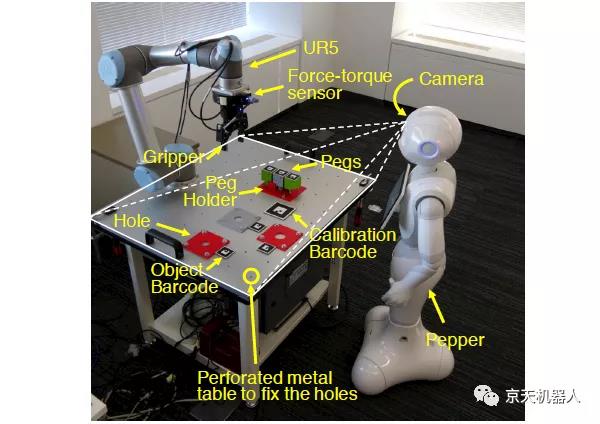
小编最近看到一篇18年ICRA的优秀论文,看后觉得很受启发,在这里给大家做一个分享。论文题目为:MaestROB: A Robotics Framework for Integrated Orchestration of Low-Level Control and High-Level Reasoning。它展示了如何在多个参与者(人员,通信机器人和工业机器人)协作执行共同的工业任务的复杂场景中使用MaestROB框架。
了解更多
移动机器人目前已经遍布军事、工业、民用等各大领域,并还在不断的发展中,目前移动机器人技术已获得了可喜的进展,研究成果令人鼓舞,随着传感技术、智能技术和计算技术等的不断提高,智能移动机器人能够在生产和生活中扮演更多角色。那么移动机器人定位技术主要涉及到哪些呢?
了解更多
“共融机器人包含了多机协作,人机互动,定位导航等研究领域。实质上描述了机器人与机器人,机器人与人,机器人与环境之间的关系。移动单臂机器人扩展了机械臂的移动半径,赋予了移动平台车更多的控制上的能力,能够适应更广阔的应用场景。”
了解更多
德克萨斯大学奥斯汀分校的核机器人小组的任务是由能源部开发一个自动系统,用于核材料的回收和处理以及污染事件的检查。早在2015年研究小组求助于ClearPath的机器人集成专家,他们帮助在Husky平台上安装了两个UR5机械臂,创造了一个独特的工业级双臂系统命名为“VaultBot”。
了解更多
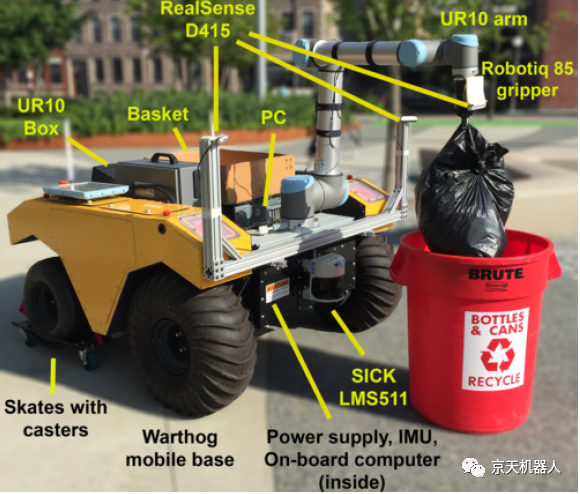
室外开放世界环境中的任务现在已经成熟,可以通过移动机械臂实现自动化。与此类任务相关的动态,非结构化和未知的环境-一个典型的例子就是收集路边的垃圾-使它们特别具有挑战性。在本文中,我们提出了一种解决在室外拾取,运输和下放新物体的方法。
了解更多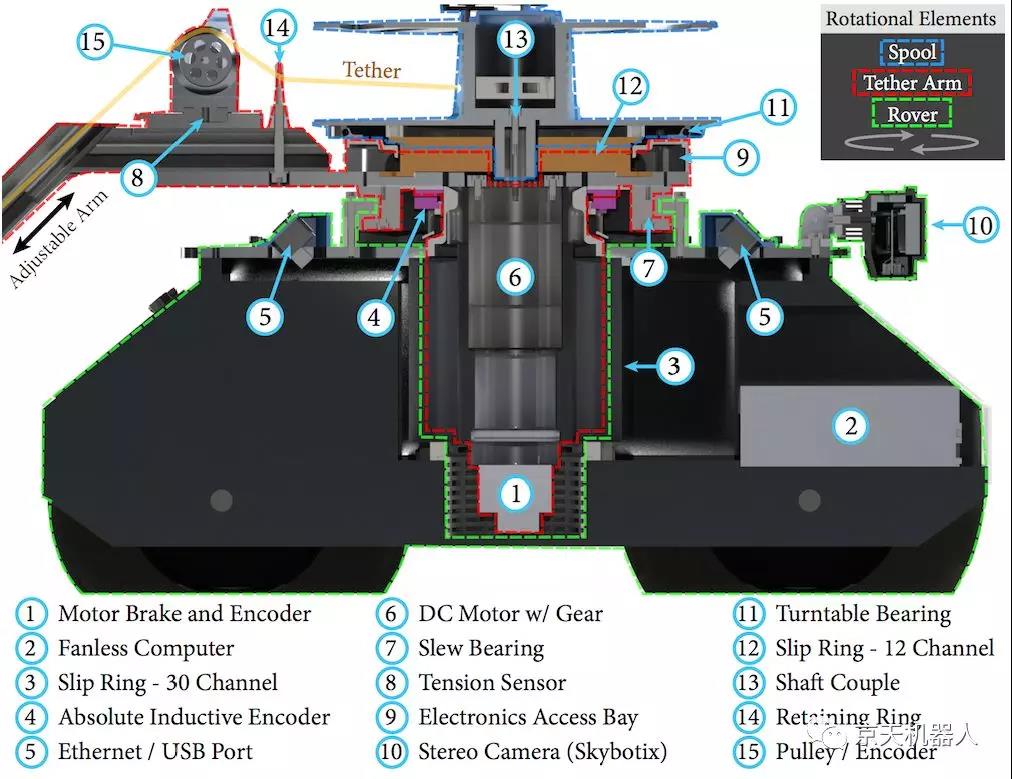
在移动机器人中使用系绳是一种新方法,可以安全地探索陡峭的地形和恶劣的环境,这些环境被认为对人类来说太危险,超出了标准地面漫游车的能力。但是,在紧张状态下的机动性,自主的系绳管理以及评估环境的方法方面,仍然存在重大挑战。
了解更多 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |
































