研究人员使用四台安装在波士顿公司开发的狗形机器人上的摄像机,可以在两米的距离内测量出健康患者的皮肤温度,呼吸频率,脉搏频率和血氧饱和度。他们现在正在计划对有COVID-19症状的患者进行测量。
了解更多
经过强化学习(RL)训练的机器人有潜力用于各种挑战性的现实世界中的问题。要将RL应用于新问题,通常需要设置环境,定义奖励功能,并通过允许机器人从头开始探索新环境来训练机器人解决任务。
了解更多
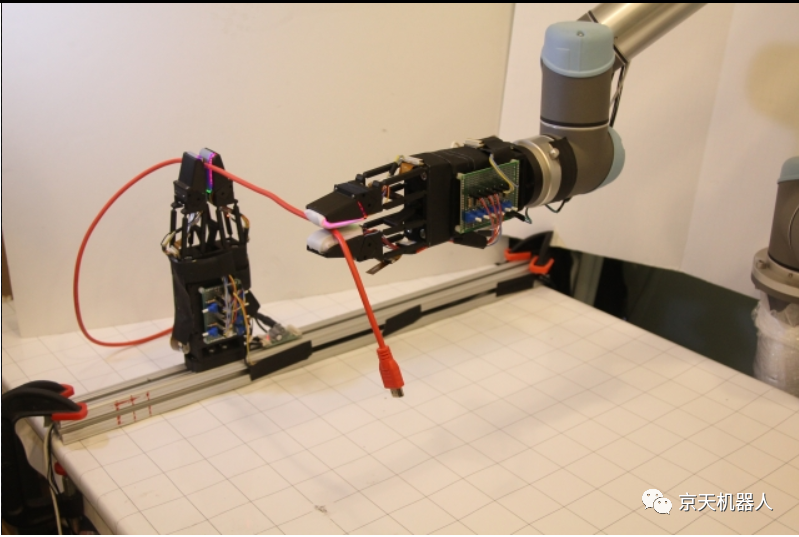
仿人机器人(仿人机器人具有与人体相似的构型)可能会迅速协助个人完成各种任务。这些机器人旨在完成的大部分任务包括选择各种形状,重量和大小的对象。尽管许多经过开发的仿人机器人能够拿起小巧轻巧的物体,但是通常很难举起笨重的物体。实际上,如果物体太大或太重,机器人可能会发现自己在摔落或摔碎物体。
了解更多

针对不同应用环境,武汉京天电器推出多种经过ROS官方认证,具有全套3D仿真环境,软硬件与通讯架构完善的移动抓取系统,用户根据应用环境选择相关方案即可快速进行相关研究工作。
了解更多


我们很高兴地宣布,我们已经为Gazebo 3D机器人模拟器创建了三个新的模拟环境。每个世界都配备了一组预制的地形,其中包括建筑和围栏,允许用户对Jackal UGV,Husky UGV,Warthog UGV或Ridgeback进行编程和测试。
了解更多
 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |