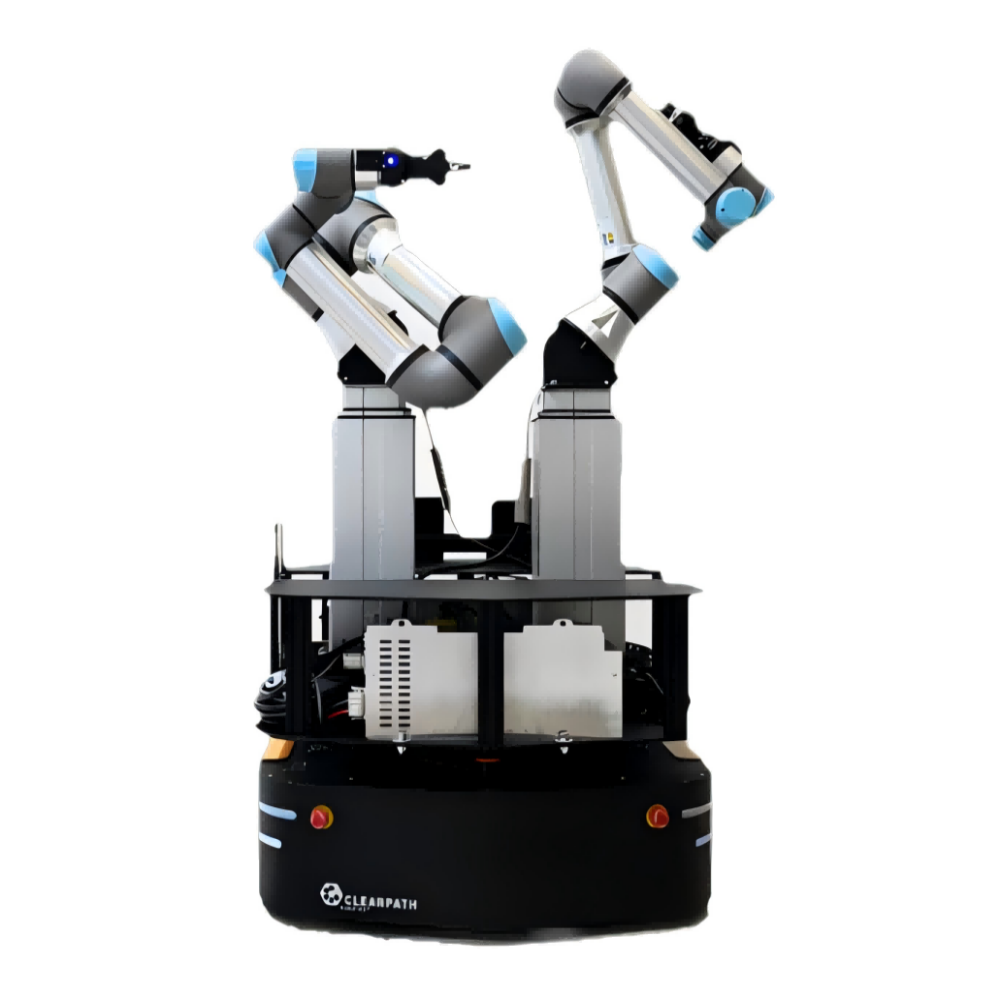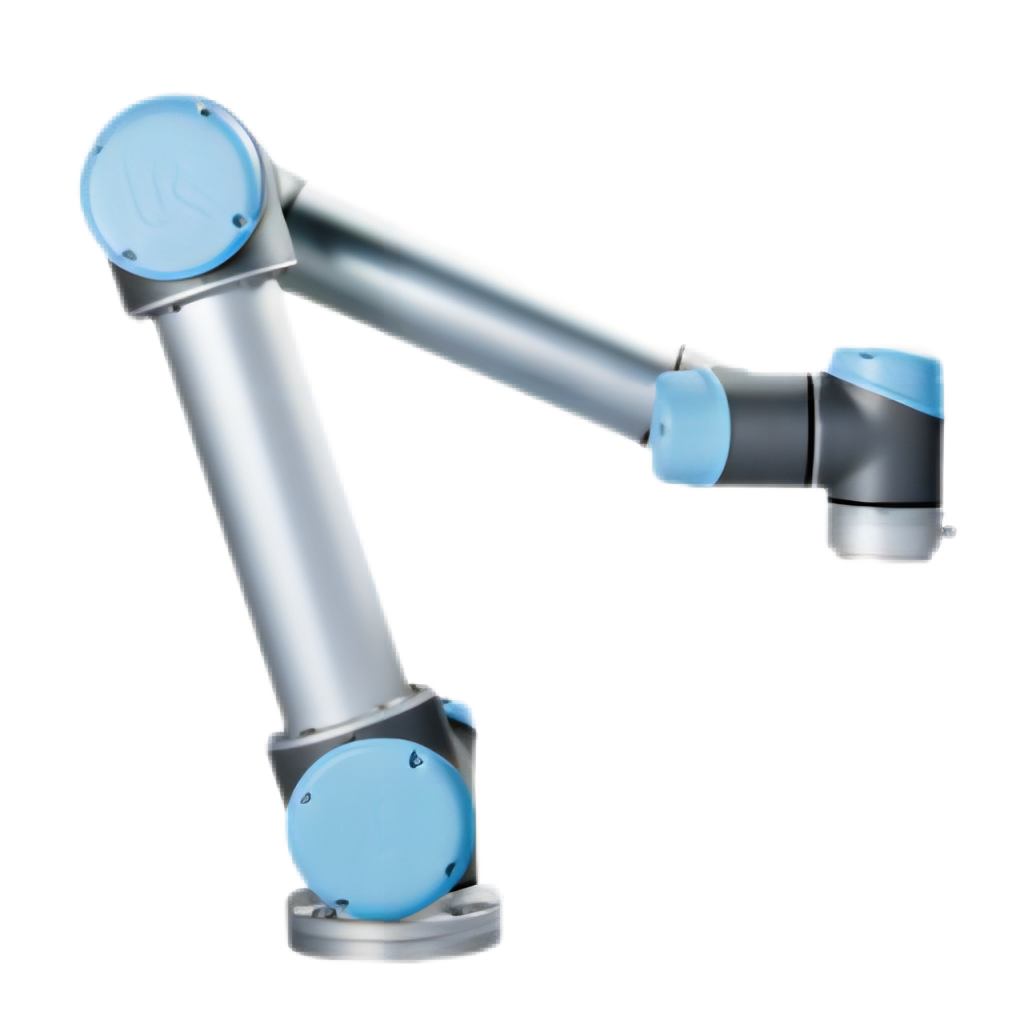
e系列是Universal Robots新推出的一系列开创性的小型协作机械臂。 e系列机械臂具有小巧、功能强大的特点,其有效载荷范围为3-10千克,工作半径从500-1300mm,所有腕关节均可实现360度旋转,末端关节可无限旋转。这种桌面式协作机械臂适合需要高精度和轻型装配作业等应用场合。 e系列可帮助任何人在数分钟内完成编程。使用直观的示教器进行编程,只需将机器人手臂移至需要的位置,或选择触摸屏上的预编程功能即可。内置的力控传感器允许e系列在高灵敏性应用中编程,同时保证了最高精度。

| 半径 | 850mm(UR5e) |
| 各轴工作范围 | ±360° |
| 重量 | 20.6kg(UR5e) |
| 重复定位精度 | ±0.03mm |
| 安全功能 | 17种先进的可调安全功能,包括手肘检测 |
| 彩色CMOS像素 | 2000万 |
| 末端速度 | 1m/s |
| 自由度 | 6Dof |
| 最大速度 | ±180° |
| 占地面积 | 149mm(UR5e) |
| 有效载荷 | 5kg(UR5e) |
| 支持功能 | 支持拖动示教、轨迹记录功能 |
| 传输接口 | USB3.0 |
| 工作温度 | 0°C~50°C |















Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |