



When you start thinking about implementing a robotic system, you may come up with some exciting ideas. Maybe you know exactly the problem you want to solve, or you already have a clear understanding of the platform you want to build. You naturally want to make it a reality by contacting the robot supplier and put your ideas into practice immediately.
More
If I want you to spread me a picnic blanket on the grass, can you? certainly. If I asked you to bring a cart full of food to the party, would you push the cart along the paved path or on the grass? Obviously it paved the way.
More
The editor recently learned that Clearpath of Canada is cooperating with Microsoft and intends to apply the ROS robot operating system to win10. At the beginning of this month, I saw the relevant trailer video released by Clearpath on the tubing, and I was very excited. This is a good news for Windows robot users, a leapfrog development of the ROS robot oper
More
The Universal Robots UR+ platform is the world's first ecosystem of third-party end effector solutions and other additional components for Universal Robots' collaborative robotic arms. UR+ platform products are all certified by UR and can be seamlessly integrated with Universal Robots' collaborative robotic arms.
More
Teaching programming is well known as a common operation method of robotic arms. Today’s article introduces you to several novel, unique and creative manipulator operation methods. I hope these successful cases can inspire you and use these methods to implement more products.
More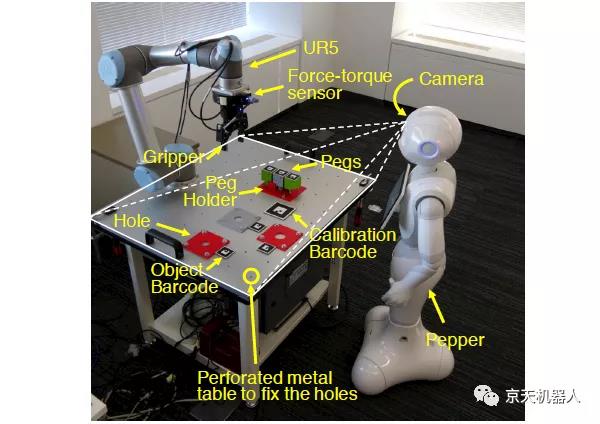
The editor recently saw an excellent paper by ICRA in 18 years. After reading it, I felt very inspired. I would like to share it with you. The title of the paper is: MaestROB: A Robotics Framework for Integrated Orchestration of Low-Level Control and High-Level Reasoning. It shows how to use the MaestROB framework in complex scenarios where multiple particip
More
Mobile robots are currently spreading across the military, industrial, and civilian fields, and are still in continuous development. At present, mobile robot technology has made gratifying progress, and the research results are encouraging. With the development of sensor technology, intelligent technology and computing With the continuous improvement of tech
More
"Inclusive robots include research fields such as multi-machine collaboration, human-computer interaction, positioning and navigation. It essentially describes the relationship between robots and robots, robots and humans, and robots and the environment. The mobile single-arm robot extends the movement of the robotic arm. The radius gives the mobile platform
More
The task of the nuclear robotics team at the University of Texas at Austin is to develop an automated system by the Department of Energy for the recovery and processing of nuclear materials and the inspection of pollution incidents. As early as 2015, the research team turned to ClearPath's robot integration experts. They helped install two UR5 robotic arms o
More
I have encountered a problem recently. Everyone is talking about "autonomous navigation", but how autonomous is this "autonomy" of autonomous navigation? Is it completely autonomous?
More
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































