



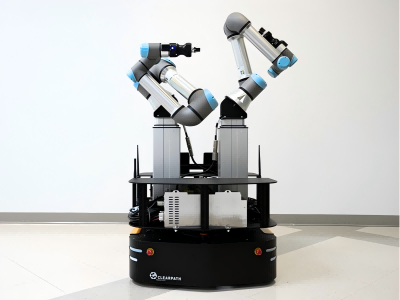
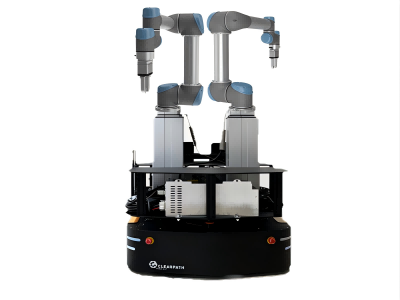
The human like perception mobile dual arm control platform Xuanwu 10-R is designed to mimic a humanoid structure. It consists of two six degree of freedom collaborative robotic arms as the "upper limbs" of a human, and a high load stable chassis as the "lower limbs" of a human. Equipped with a comprehensive perception module, it collects real-time data, analyzes the environment, automatically locates and navigates, and achieves efficient mobile composite operations. Based on this platform, we can expand the development of practical application scenarios from multiple fields such as biopharmaceuticals, professional specialties, industrial manufacturing, and home services. For example, we can build and deploy complete biochemical experimental equipment on the platform, combine it with the Al large model, and enable robots to focus on reproducing human operational abilities under the premise of safe interaction.
| size | 960×793×311mm |
| chassis load | 100kg |
| power | 2000W (peak); 800W (continuous value) |
| encoder | >250000 Counts Per Meter |
| mechanical arm load | 10kg |
| scope of work | 1700mm |
| maximum rotation speed | 180°/s |
| weight | 135kg |
| maximum speed | 1.1m/s |
| operation time | 15h(in maximum load) |
| communication | Ethernet、USB3.0、RS232 |
| degree of freedom | 12 |
| repeatability | ±0.03mm |
| rotation range | ±360° |
| clamping force | 20-235N |



Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































