



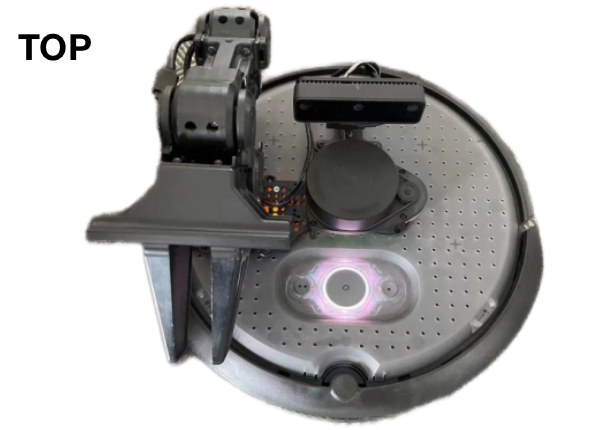
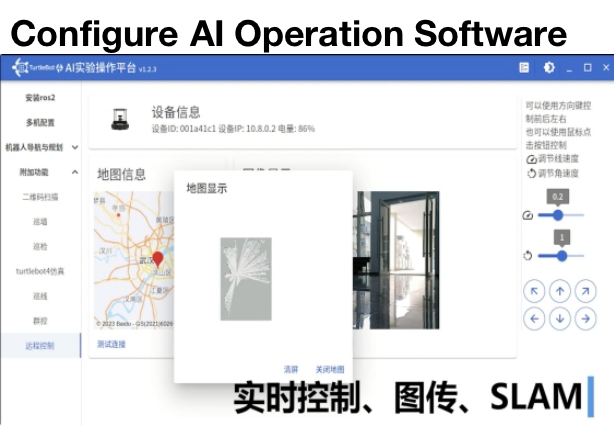
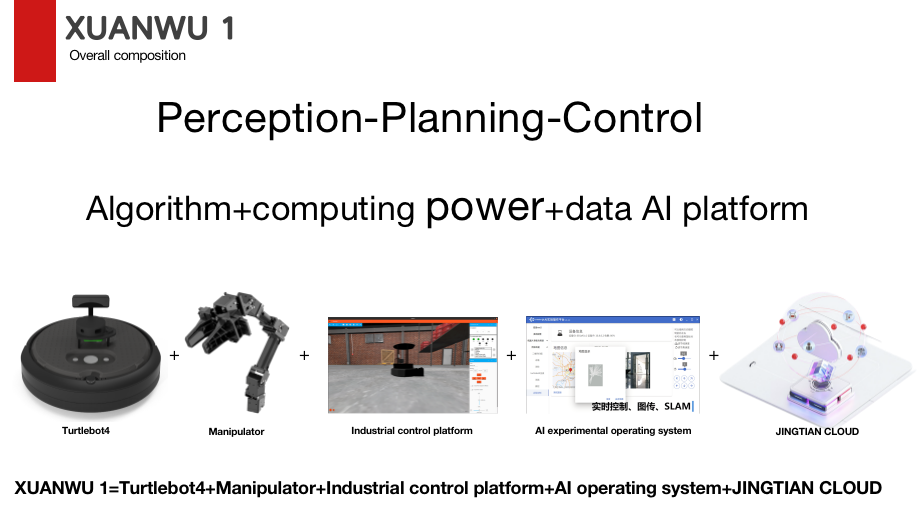
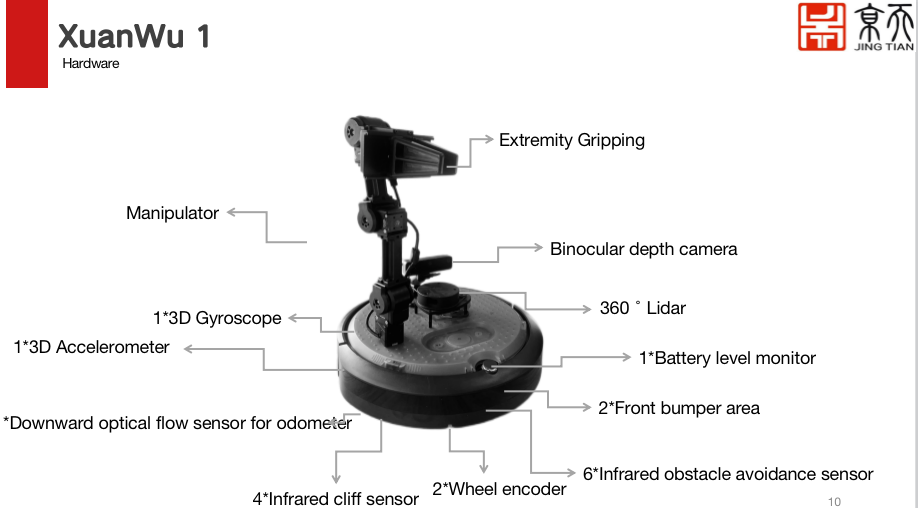
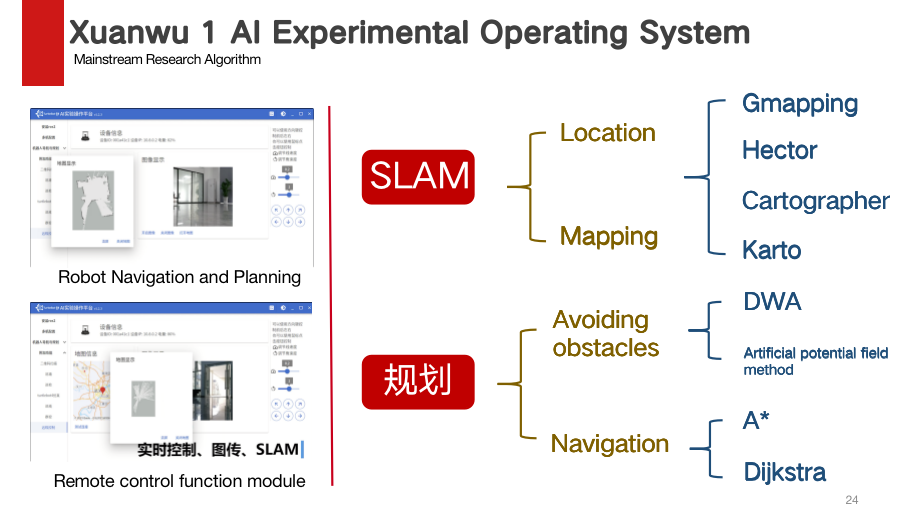
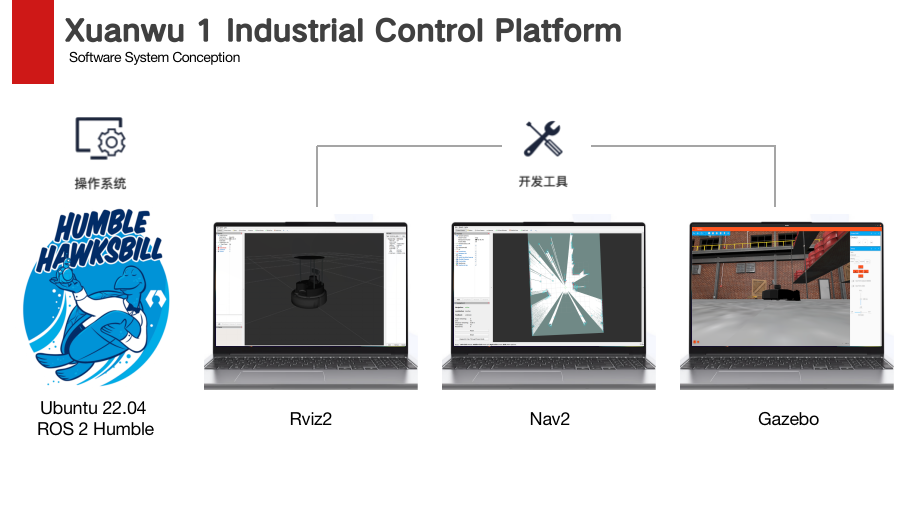
Xuanwu 1 is a mobile grabbing robot development kit based on ROS. Its base is based on the Turtlebot4 Smart Edition, which integrates a 5-degree of freedom fully open source robotic arm, anti-collision sensors, fall sensors, infrared sensors, 360 degree LiDAR, binocular depth vision cameras, and more. Standard industrial control platform and AI experimental operation platform, can install ROS2.0 with one click, built-in 3 mapping modes, 4 navigation algorithms, including group control software for less than 101 cars, AI neural network calculation, and support campus network cloud remote control software and automatic data generation system for students. It provides experimental tutorials and courseware for professional courses such as computer, artificial intelligence, surveying, remote sensing, telecommunications, automation, robot engineering, etc. Assist university teachers in easily carrying out teaching and research work.

| Robot degrees of freedom | 7 |
| Weight | 4Kg |
| Repetitive positioning accuracy of robotic arm | ± 0.2mm |
| Maximum joint speed | 46RPM |
| Power battery | Automatic docking of charging stations (iRobot ® Home Base ™) |
| 360 ° LiDAR | RPLIDAR-A1 (detection distance 0.15-12m, 8kHz sampling rate, 1 ° angle resolution) |
| Base integrated sensor | 2 * Front bumper area, 2 * Wheel encoder, 4 * Infrared cliff sensor, 6 * Infrared obstacle avoidance sensor, 1 * Downward optical flow sensor for odometer, 1 * 3D gyroscope, 1 * 3D accelerometer, 1 * Battery level monitor |
| Dimensions | 341mm*339mm*671mm |
| Maximum Speed | 0.46m/s |
| Clamping stroke | 20-75mm |
| Arm extension | 479mm |
| Work environment | -10~40 ° C |
| Run time | 2.5h-4h |
| Binocular depth camera | 12 million pixels, measurement range 0.2-19.1m, interface USB3.0, RGB camera resolution 13MP (4208 * 3120) Binocular camera resolution 480P (640 * 480) |
| AI experimental cloud operation platform | Built in 3 mapping modes, 4 navigation algorithms, including group control software for less than 101 small cars Built-in functional modules (QR code scanning, inspection, wall inspection, line inspection, 3D simulation) One click operation function: one click exit, one click return, keyboard control, and quick switching of robot individuals/groups |

Optional indoor home simulation scene sand table, with a size of 4 * 4 meters

Taking 3 years to continuously update the course courseware of mobile grabbing robots

Optional router and 5G IoT card
Xuanwu No.1 can be equipped with Jingtian Cloud, including cloud, robot, and user (student, teacher) terminals. Built in Beidou high-precision positioning algorithm, intelligent PNT key technology, AI algorithm, supporting remote remote operation of campus network



Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































