


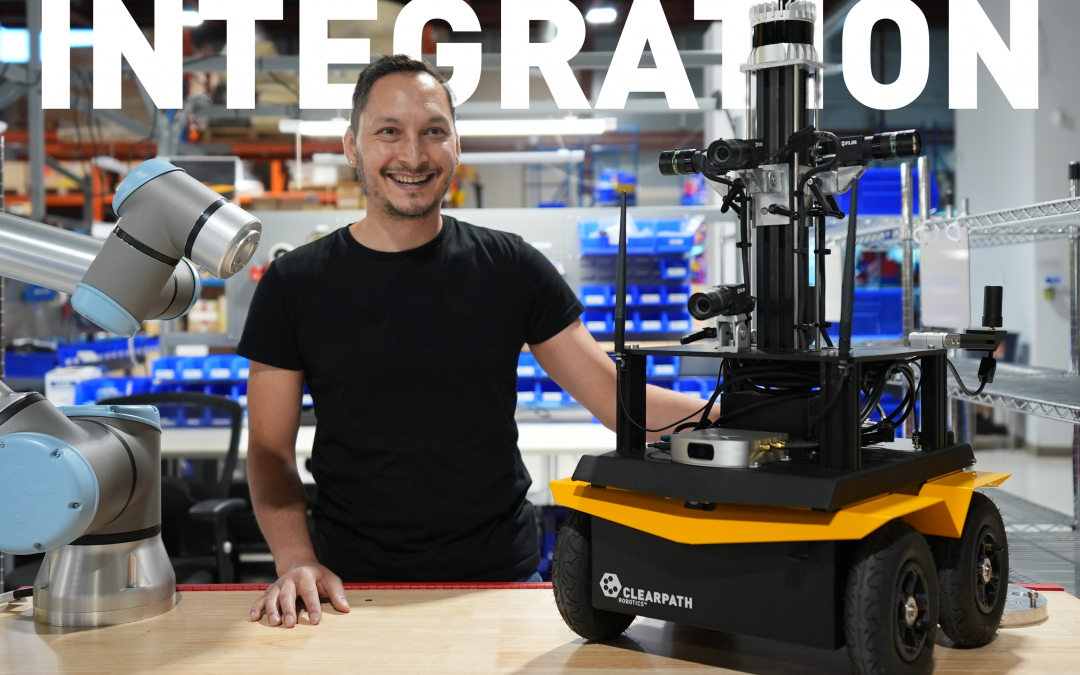
Cameras are a fundamental component in mobile robotics, providing essential visual data that enables robots to perceive, interpret, and interact with their surroundings. In this custom integration, our team outfitted the Jackal UGV mobile base with an array of FLIR Blackfly cameras, alongside a suite of additional sensors and tailored modifications. These cu
More
Inthebustlingworldofrailtransportation,efficiencyisparamount.Railyards–thosecrucialhubswheretrainsareassembled,sorted,anddispatched–playapivotalroleinensuringthatfreig
More
Xuanwu 3 "is an autonomous inspection robot integrated by the Jingtian Robotics team, which has recently been deployed in a large solar facility. Its task is to autonomously navigate countless rows of solar panels and use its onboard thermal imager to identify any potential safety risk issues.
More
The research team at Carnegie Mellon University recently published an innovative study, which developed a real-time human to humanoid (H2O) full body remote control system. It is worth mentioning that the humanoid robots in the experiment are the H1 ReS humanoid robots from Unitree, which have also evolved faster recently (3.3 m/s) and can perform backflip i
More
Seed Robotics is a British company founded in 2015, specializing in research and solutions for robotic dexterous hands, primarily in the fields of artificial intelligence, neuroscience, psychology, and cognitive science. Our main products include: 3-finger dexterous hand RH2D, 4-finger dexterous hand RH7D, 5-finger humanoid 1:1 dexterous hand SR-RH8D, and FT
More
The Yushu Technology H1 humanoid robot is designed with lightweight materials, with an overall weight of only 47kg and 19 degrees of freedom throughout the body. The walking posture is light and stable, and the particularly prominent H1 leg joint motor part has a peak torque of 360N · m. Combined with a hollow axis and dual encoder, it fully benchmarks with
More
we utilized the Ridgeback robot for its exceptional stability and omnidirectional functionality. Ridgeback is an indoor platform that is capable of smooth carrying and powering of heavy manipulators, as well as supporting equipment and sensors that would be required to perform useful lab work.
More
Developing assistive robots is a challenging research area, especially when integrating these systems into human environments such as homes and hospitals. To tackle these challenges, the Human-Machine Interaction & Innovation (HMI2 ) Lab at Santa Clara University is creating a versatile intelligent robot.
More
Agricobots的项目旨在开发一种被称为VinyA st-4030的专用葡萄园喷洒机器人。该机器人的设计目的是在以陡坡和潜在滑溜为特征的高要求和危险的景观中导航。
More
多伦多大学和慕尼黑工业大学的学习系统与机器人实验室的项目旨在开发一种“服务员机器人”,能够平衡托盘上的物体,在动态环境中导航,避免碰撞,并成为顶级服务器。 他们的项目包括控制机器人在托盘上平衡物体的能力,同时在周围环境中导航,并像传统餐厅服务员一样避开障碍物。
More
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































