


Jingtian robot sincerely cooperates with colleges and universities to jointly develop teaching resources and characteristic teaching materials, so as to benefit the cooperative colleges and universities and the majority of teachers and students.
Jingtian robot sincerely cooperates with colleges and universities to jointly develop teaching resources and characteristic teaching materials, so as to benefit the cooperative colleges and universities and the majority of teachers and students.


Humanoid robot Practical Training course
Authors: Chen Xiaoqiao,Hu Mingyu,Liu Yushi
Summary:
This book aims to cultivate students' ability to analyze and solve complex problems, practical ability, spatial perception, mathematical logic, imagination and creativity. This book mainly takes Nao robot as an example to introduce the development history, theoretical basis and programming methods of humanoid robot, summarize the experience of humanoid robot practical teaching and competition training, and sort out rich practical training cases. This book starts with graphical programming, introduces python programming, provides a large number of code examples, and deeply analyzes humanoid robots. It is hierarchical. It can guide students who are programming zero foundation or robot zero foundation to understand the basic theory and technology of humanoid robots, quickly enter the door and master the programming skills of humanoid robots, and manually realize various human-computer interaction cases.

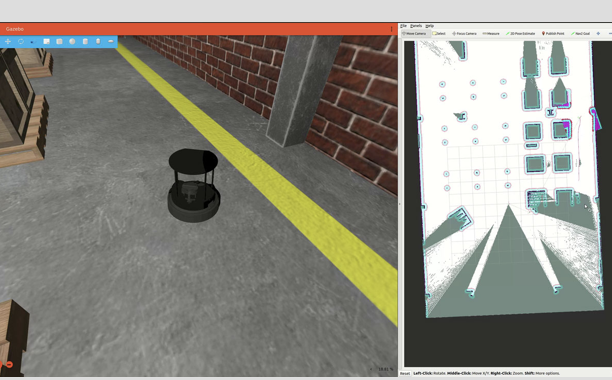
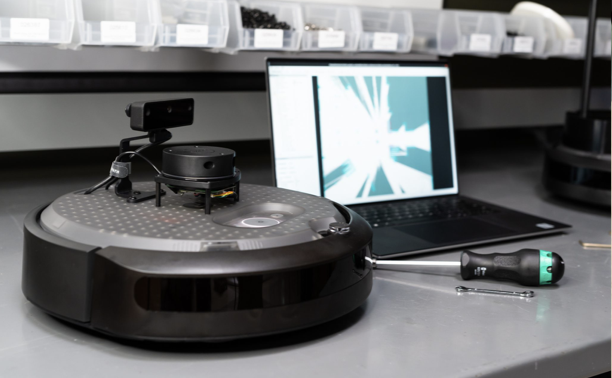
ROS robot programming
Authors: Biao Yunxi, Zhao Hanzhe, Zheng Lijiao, Lin Taixun
Summary:
ROS robot programming, from basic concepts to actual robot application programming!
Contains ROS Kinetic Kame: basic concepts, explanations and tools; use sensor function package and motor function package in ROS; embedded control version specially designed for ROS: OPENCR; use LABOX (leek box) to achieve SLAM and navigation; use ROS java write distribution robot program; use MoveIt! Use Gazebo to simulate the LABOX (leek box) robotic arm.

Author: Wang Dadong Press: Tsinghua University Press
Summary:
Pay attention to the level of NAO robot programming. The book includes both NAO QI API programming and Choregraphe environment instruction box-level programming. Readers of different basics can benefit from the book. Pay attention to the differences in the understanding of readers at different learning stages, and organize the materials to focus on the easy first and then the difficult. First introduce the basic knowledge of the key concepts in NAO robot programming, and then complete the actual program design part. A large number of code examples are given in the book, and the examples are analyzed in depth for easy understanding.
This book can be used as a programming reference book for NAO users, and can also be used as a course material for "NAO Robot Programming" for computer and related majors in colleges and universities.

Author: Shen Zebang, Yong Binbin, Zhou Qingguo, Li Liang, Li Guanjing Publisher: Machinery Industry Press
Summary:
The content of this book includes: first understanding of unmanned driving systems; introduction to ROS; positioning methods of unmanned driving systems; state estimation and sensor fusion; machine learning and neural network foundations; deep learning and unmanned driving visual perception; migration learning and end-to-end End unmanned driving; introduction to unmanned driving planning; vehicle model and advanced control; deep reinforcement learning and its application in autonomous driving.
This book serves as an introductory and practical textbook and reference book for unmanned driving technology. It is recommended that students have basic programming skills as well as the basic knowledge of probability theory and linear algebra. It is recommended that students should be oriented towards undergraduate and master's degree students in the fields of computer, automation, machinery and other fields.

Author: NPLUS AI Press: Higher Education Press
Summary:
This book uses the pepper robot as the main teaching carrier and tool, and Choregraphe as the main development software platform (supporting Pythin and graphical programming), focusing on learning and time artificial naive spoof technology in the field of speech recognition, image recognition, text recognition, video Recognition and other basic technical knowledge, in the teaching process, interspersed with key knowledge points such as neural network, machine learning, natural language understanding, and used robot process automation to connect the robot and the intelligent digital world to form a scene application. The task-driven teaching method helps students to understand and learn the related knowledge of artificial intelligence intuitively and accurately.
It is recommended that the total teaching hours of this course are 32 hours. Each school can arrange it flexibly according to the actual teaching. The courses of artificial intelligence science learning or interest classes can be arranged 16 hours, and 64 hours can be arranged as professional courses, with more hands-on practice and innovation.
NAO robot*6, leek box (LABOX)*6, Xuanwu No. 2*6, Qinglong No. 2*6










Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































