



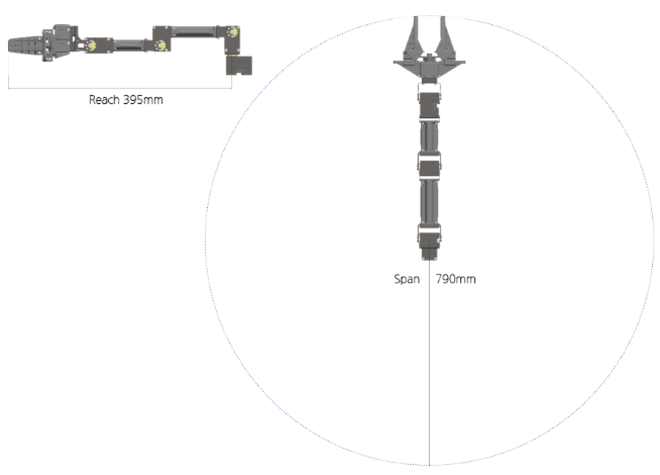
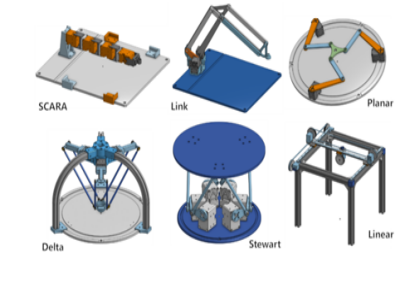
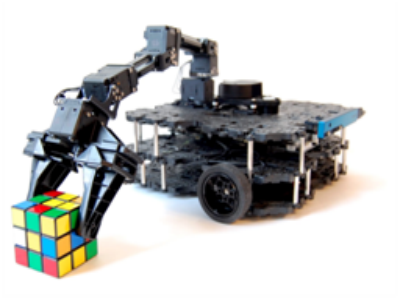
The hand-held manipulator is a fully open source robot operating platform with excellent performance, with six classic morphological deformations; complete secondary development, supporting ROS, matlab simulation, C++, Python and other programming; simple and easy to use, allowing users to get better Robot experience. The end tools of the robotic arm can be replaced according to user needs. Except for the metal connectors, other skeletons of the body can be 3D printed.
| technical parameter |
|





Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |































