


Guided by the demand for talents in new industries, aiming at the cultivation of new engineering science and technology talents, in accordance with the requirements of international engineering education professional certification, integrate advanced teac
Robot Engineering (Robot Engineering) is to cultivate the comprehensive development of morality, intelligence, physical and beauty that meets the needs of social development, with moral and cultural qualities and a sense of social responsibility, master t
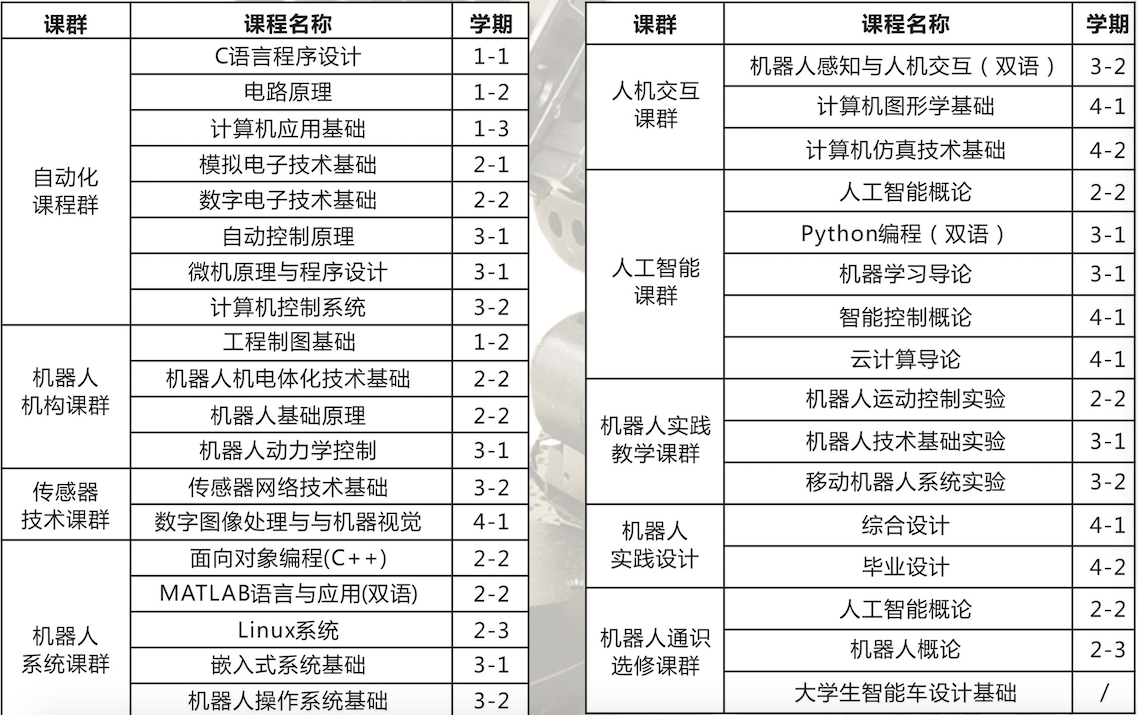
Through the study of this course, we will consolidate the basic theoretical knowledge of Robotics, understand the main hardware composition and working principle of Jingtian Robot, master the connection principle of Jingtian Robot and remote host, and understand the Rviz simulation software based on ROS operating system. Application, master relevant experimental methods and practical skills related to the realization principle of autonomous navigation function.
Jingtian Robot*8, mini display*8, computer mouse and keyboard*6, power strip*6, power converter*6, portable battery *6
Number | Experimental project | Experiment purpose and content | Class hours | Experiment type | Experimental requirements |
1 | Mobile robots realize dynamic surveying and mapping | Purpose: Master the basic methods of robot programming and realize SLAM. Content: PC connects with Turtlebot, SLAM map construction. | 2 | verify | Must |
2 | Mobile robot autonomous navigation and obstacle avoidance | Purpose: To understand the principle of obstacle avoidance, to realize autonomous robot navigation and real-time obstacle avoidance. Content: Use the lidar equipped with Turtlebot to simulate real-time obstacle avoidance. Set initial pose, set target pose, autonomous navigation, real-time obstacle avoidance | 2 | verify | Must |
(PS:相关实验课程依据指导教材,专业以及课时数针对性为高校老师定制。)


Teaching programming is well known as a common operation method of robotic arms. Today’s article introduces you to several novel, unique and creative manipulator operation methods. I hope these successful cases can inspire you and use these methods to implement more products.
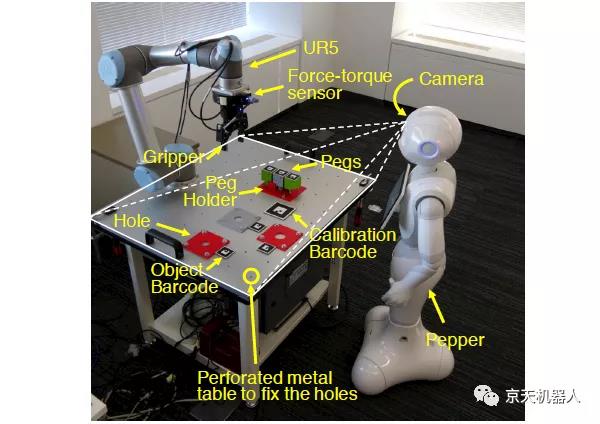
The editor recently saw an excellent paper by ICRA in 18 years. After reading it, I felt very inspired. I would like to share it with you. The title of the paper is: MaestROB: A Robotics Framework for Integrated Orchestration of Low-Level Control and High-Level Reasoning. It shows how to use the MaestROB framework in complex scenarios where multiple participants (personnel, communication robots, and industrial robots) collaborate to perform common industrial tasks.

Mobile robots are currently spreading across the military, industrial, and civilian fields, and are still in continuous development. At present, mobile robot technology has made gratifying progress, and the research results are encouraging. With the development of sensor technology, intelligent technology and computing With the continuous improvement of technology, intelligent mobile robots can play more roles in production and life. So what are the mobile robot positioning technologies mainly involved?

"Inclusive robots include research fields such as multi-machine collaboration, human-computer interaction, positioning and navigation. It essentially describes the relationship between robots and robots, robots and humans, and robots and the environment. The mobile single-arm robot extends the movement of the robotic arm. The radius gives the mobile platform vehicle more control capabilities and can adapt to a wider range of application scenarios."

The task of the nuclear robotics team at the University of Texas at Austin is to develop an automated system by the Department of Energy for the recovery and processing of nuclear materials and the inspection of pollution incidents. As early as 2015, the research team turned to ClearPath's robot integration experts. They helped install two UR5 robotic arms on the Husky platform and created a unique industrial-grade dual-arm system named "VaultBot".

I have encountered a problem recently. Everyone is talking about "autonomous navigation", but how autonomous is this "autonomy" of autonomous navigation? Is it completely autonomous?
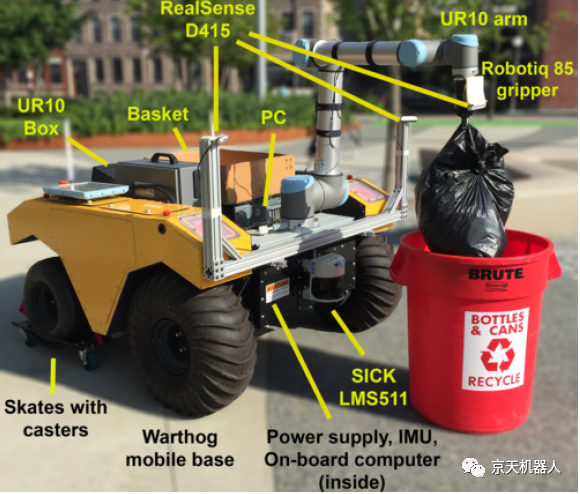
The tasks in the outdoor open world environment are now mature and can be automated by moving robotic arms. The dynamic, unstructured and unknown environment associated with such tasks-a classic example of collecting roadside garbage-makes them particularly challenging. In this article, we propose a solution for picking up, transporting and dropping new objects outdoors.
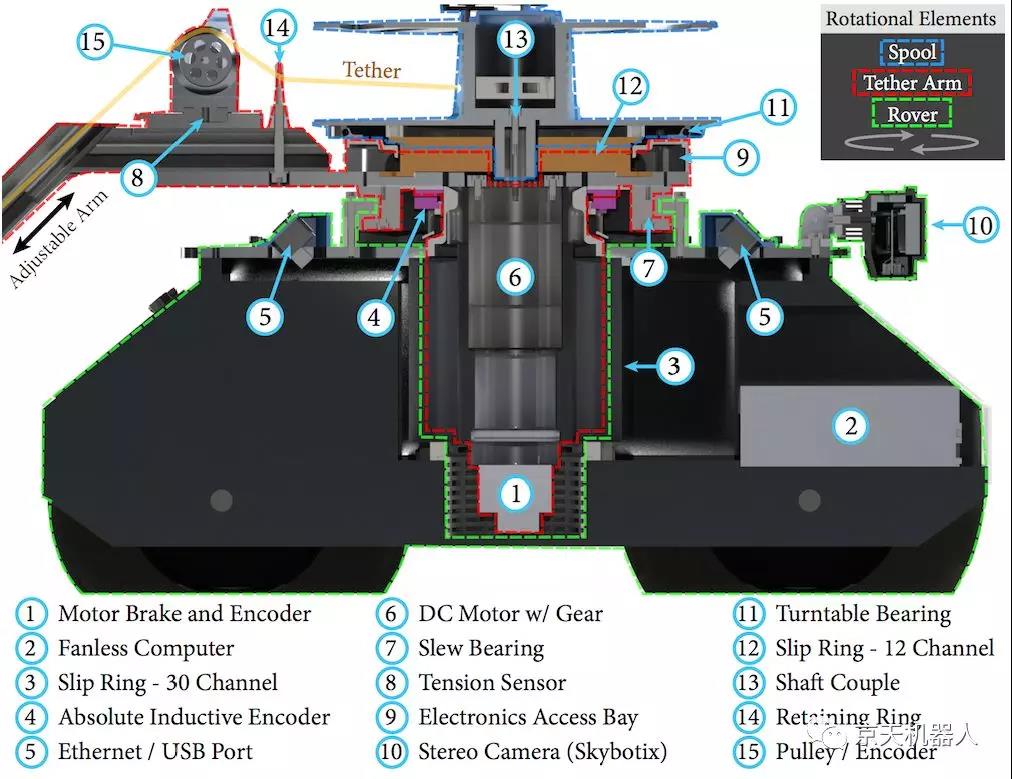
The use of tethers in mobile robots is a new way to safely explore steep terrain and harsh environments that are considered too dangerous for humans and beyond the capabilities of standard ground rover. However, there are still major challenges in terms of mobility under tension, autonomous tether management, and methods of assessing the environment.


Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































