



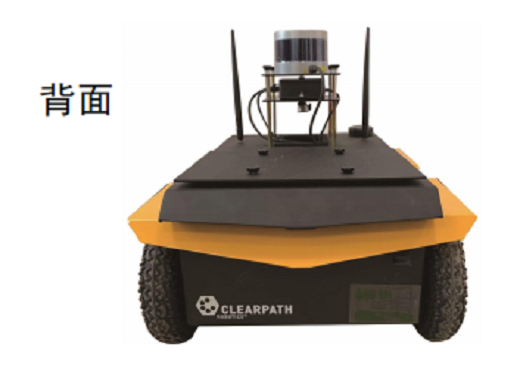
The "Xuanwu 2" unmanned driving platform of the LIUSHU CHEKU is designed by Wuhan Jingtian Electric Co., Ltd. for the experimental teaching needs of robot-related majors in major universities across the country. The Xuanwu 2's on-board computer, GPS, IMU, depth camera, multi-line lidar and ROS system are integrated, showing a distinctive automation capability. Create a wireless connection via Bluetooth and wifi, and work immediately as soon as it is turned on. The chassis is entirely made of lightweight aluminum alloy and provides IP65 protection when the main bulkhead is sealed. The high-torque 4x4 drive system gives the car a strong traction. At the same time, it has enough vehicle power to cross obstacles or loose terrain. The custom-made top plate can replace the payload, and Xuanwu 2 is compatible with many robot accessories, which can quickly assist users in research and development. In addition, the use of ROS and API allows users to obtain full visibility of the Xuanwu 2 operation.

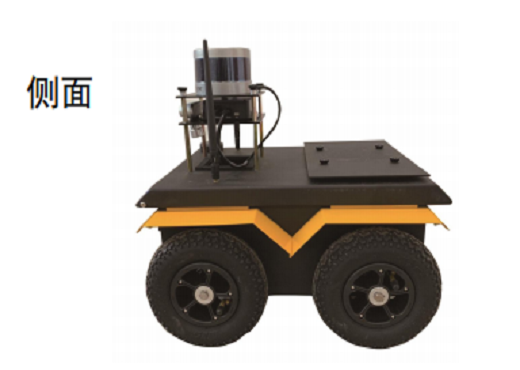
| Outside size | 508x430x250mm 20x17x10in |
| Maximum speed | 2.0m/s(6.6in/s) |
| operation hours | 2-8h |
| Encoder | 78,000 pulses/m (orthogonal) |
| Depth camera measurement range | Up to 10 meters |
| Communication | Ethernet, USB 3.0, RS232, IEEE 1394 |
| weight | 17kg |
| Maximum linear acceleration | 20m/s2 |
| Payload | outdoor:10kg/22lbs indoor:20kg/44lbs |
| Control mode | Open loop/wheel speed/motion command |
| 16-line lidar | Measuring distance ≥100 meters |
| user power | 5V @ 5A;12V @ 10A;24V @ 20A |






Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































