


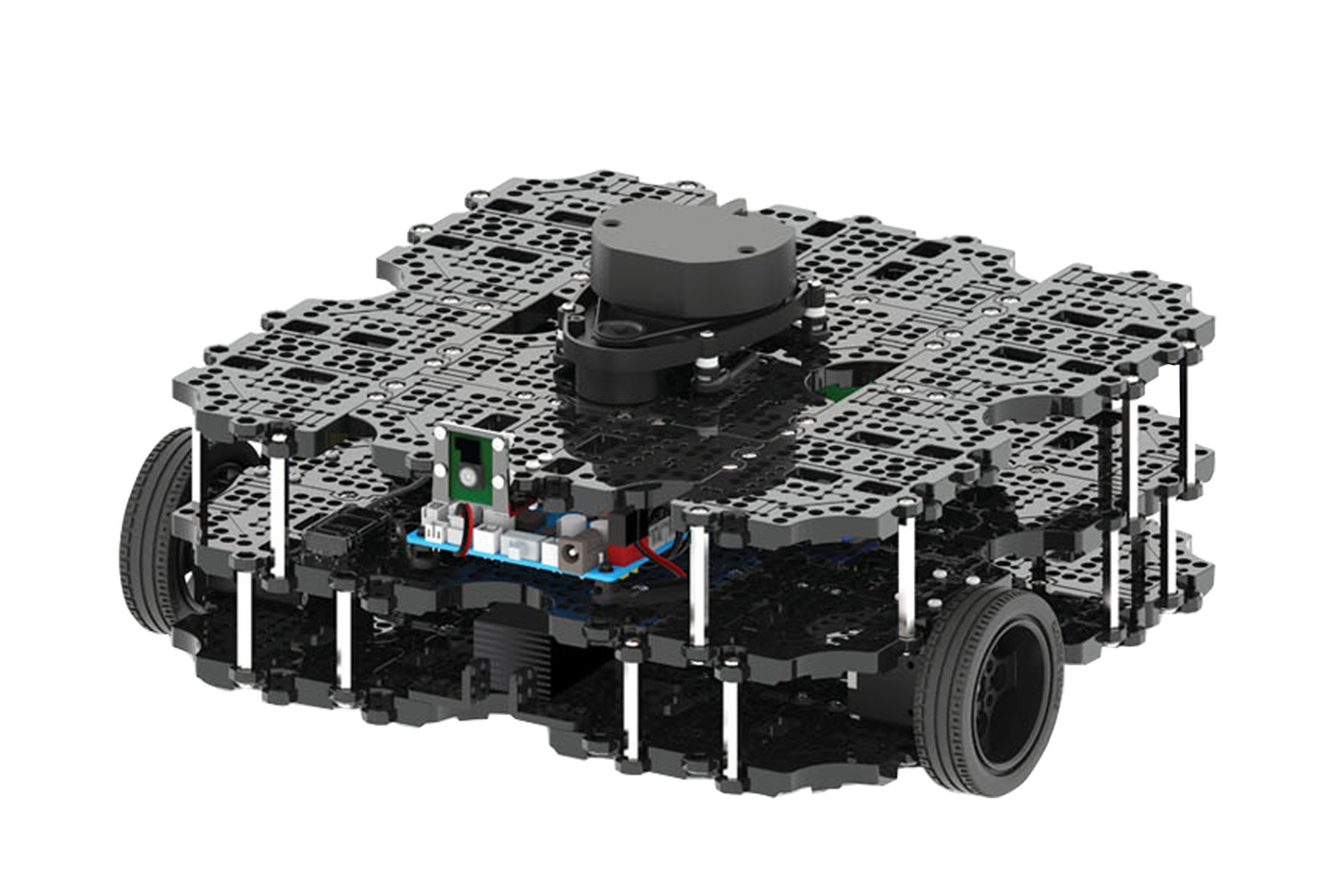
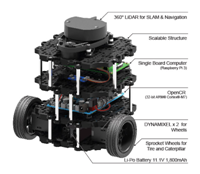
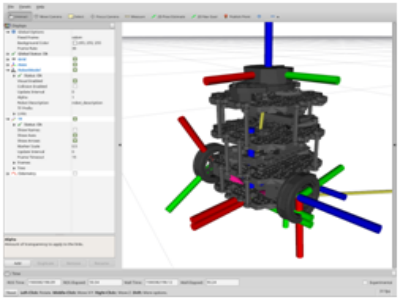
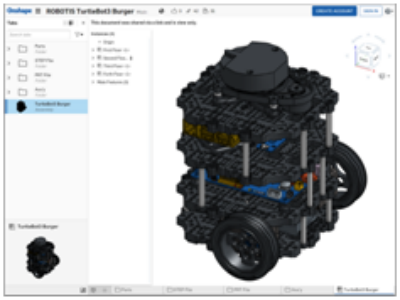
Waffle Pi is a new mobile robot in the Turtlebot3 series, which was officially released in February 2018. Waffle Pi adopts a retractable frame structure, uses Arduino-based OpenCR as the driver board, and uses a powerful Raspberry Pi 3 single-board computer, equipped with 360° Lidar, Raspberry Pi camera and 9-axis inertial measurement unit, with high precision The Dynamixel steering gear can easily achieve accurate control of mobile robots, and can be used for research and exploration in the fields of SLAM, positioning and navigation, mobile operation, automatic driving, item identification, and tracking.

| TurtleBot3 hardware configuration comparison table |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||

舵机

3D激光雷达

深度相机

Beidou ROS Robot Intelligent Terminal





Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































