


提供最先进的智能机器人科研平台,助力高校用户发文章和申请项目
Through the integration of the Universal Robots UR5 robot arm integrated Pickit series camera, a more intelligent and versatile robot vision task solution is realized, such as: easy and automated execution of pick and place tasks, material handling/packag
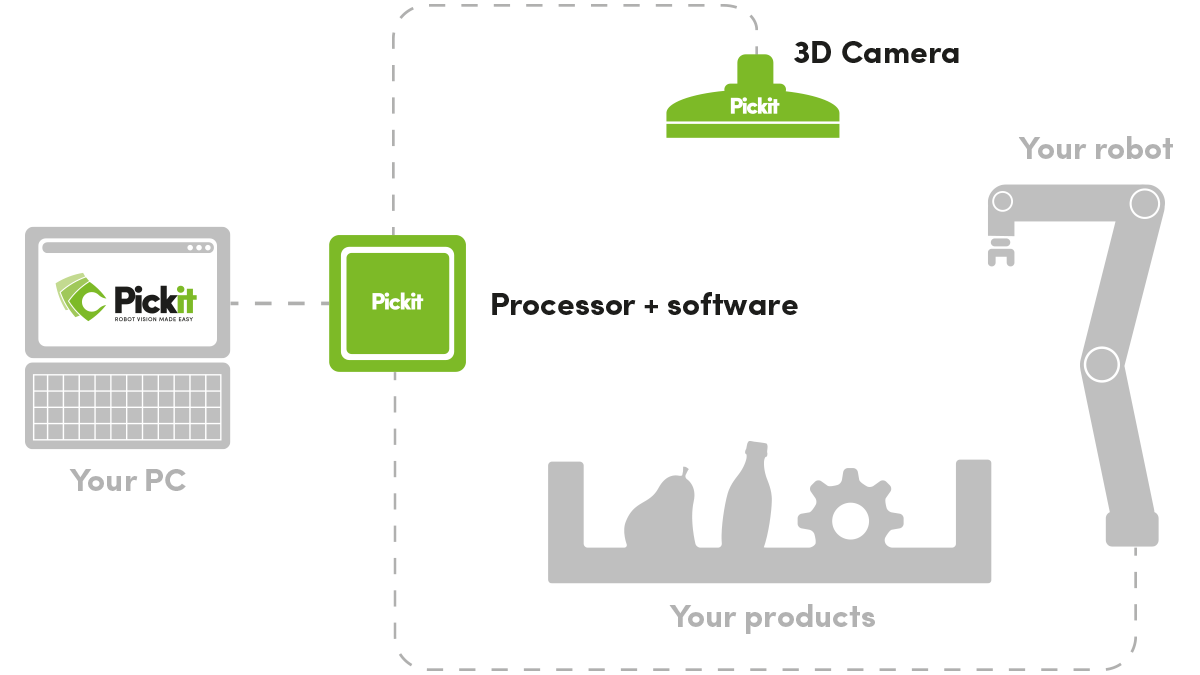


The main hardware of the program includes: 1 UR5 robotic arm (can be other UR models), PICK-IT M-HD 3D vision system, and a 2-finger or 3-finger gripper. The UR+ plug-in allows the two to be perfectly combined to achieve various 3D visual sorting tasks.
1)Design of Motion Controller of Mobile Robot
Röhrig C, Heß D, Künemund F. Motion controller design for a mecanum wheeled mobile manipulator[C]//2017 IEEE Conference on Control Technology and Applications (CCTA). IEEE, 2017: 444-449.
2)Real-time motion control for upper limb tracking
Omarali B, Taunyazov T, Bukeyev A, et al. Real-Time Predictive Control of an UR5 Robotic Arm Through Human Upper Limb Motion Tracking[C]//Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction. 2017: 237-238.
3)Use UR to imitate human writing
Miatliuk K, Wolniakowski A, Diaz M, et al. Universal robot employment to mimic human writing[C]//2019 20th International Carpathian Control Conference (ICCC). IEEE, 2019: 1-5.
1)Calibration of UR5 manipulator based on kinematics model
Liang B, Cheng Y, Zhu X, et al. Calibration of UR5 manipulator based on kinematic models[C]//2018 chinese control and decision conference (CCDC). IEEE, 2018: 3552-3557.
2)UR5 dynamic modeling
Kebria P M, Al-Wais S, Abdi H, et al. Kinematic and dynamic modelling of UR5 manipulator[C]//2016 IEEE international conference on systems, man, and cybernetics (SMC). IEEE, 2016: 004229-004234.
3)Based on singularity-robust multi-task priority inverse kinematics framework
Moe S, Antonelli G, Pettersen K Y, et al. Experimental results for set-based control within the singularity-robust multiple task-priority inverse kinematics framework[C]//2015 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2015: 1233-1239.
4)A new method for inverse kinematics
Moe S, Antonelli G, Teel A R, et al. Set-based tasks within the singularity-robust multiple task-priority inverse kinematics framework: General formulation, stability analysis, and experimental results[J]. Frontiers in Robotics and AI, 2016, 3: 16.
1)Image vision automatic calibration system based on UR
Jian B L, Tsai C S, Kuo Y C, et al. An image vision and automatic calibration system for universal robots[J]. Journal of Low Frequency Noise, Vibration and Active Control, 2019: 1461348419874925.
2)New planning method based on UR
Tatsubori M, Munawar A, Moriyama T. Design and Implementation of Linked Planning Domain Definition Language[J]. arXiv preprint arXiv:1912.07834, 2019.
3)Hand-eye calibration
Li J, Li X, Dun A, et al. Hand-eye calibration for flexible manipulator[C]//Journal of Physics: Conference Series. IOP Publishing, 2019, 1187(3): 032097.
4)Adaptive learning based on UR
Inoue T, Chaudhury S, De Magistris G, et al. Transfer learning from synthetic to real images using variational autoencoders for robotic applications[J]. arXiv preprint arXiv:1709.06762, 2017.
5)UR-based visual tracking
Ramachandruni K, Jaiswal S, Shah S V. Vision-based control of UR5 robot to track a moving object under occlusion using Adaptive Kalman Filter[M]//Proceedings of the Advances in Robotics 2019. 2019: 1-6.
1)Automatic adjustment and configuration of path planning algorithms
Burger R, Bharatheesha M, van Eert M, et al. Automated tuning and configuration of path planning algorithms[C]//2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017: 4371-4376.
2)Robot task planning and evaluation method
Paxton C, Jonathan F, Hundt A, et al. Evaluating methods for end-user creation of robot task plans[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2018: 6086-6092.
3)Predictive control of deep learning for human motion tracking
Agravante D J, De Magistris G, Munawar A, et al. Deep learning with predictive control for human motion tracking[J]. arXiv preprint arXiv:1808.02200, 2018.
4)Time optimal planning based on UR collaborative robot
Zhenyi C. Joint Trajectory Time Optimization of Cobot Based on Particle Swarm Optimization[C]//IOP Conference Series: Materials Science and Engineering. IOP Publishing, 2019, 616(1): 012015.
5)Multi-manipulator trajectory planning algorithm
Tavares P, Lima J, Costa P, et al. Multiple manipulators path planning using double A[J]. Industrial Robot: An International Journal, 2016.
1)UR-based rehabilitation robot
Kyrkjebø E, Laastad M J, Stavdahl Ø. Feasibility of the UR5 Industrial Robot for Robotic Rehabilitation of the Upper Limbs After Stroke[C]//2018 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2018: 1-6.





Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































