


提供最先进的智能机器人科研平台,助力高校用户发文章和申请项目
By optimizing the arrangement and system integration of the Clearpath Husky UGV and Universal Robots UR5 manipulators, a more intelligent and versatile robot flexible task solution is realized, such as: hazardous materials EOD, cargo handling, product sor


1. Map building, positioning and navigation(SLAM)
1) Use Husky's navigation control package for the control of other robots
Sokolov M, Lavrenov R, Gabdullin A, et al. 3D modelling and simulation of a crawler robot in ROS/Gazebo[C]. Proceedings of the 4th International Conference on Control, Mechatronics and Automation, 2016: 61-65.
2) Obstacle avoidance research based on odometer, IMU and lidar
Xie H, Gao J, Zuo L, et al. An Improved Obstacle Avoidance Method for Robot Based on Constraint of Obstacle Boundary Condition[C]. 2017 2nd International Conference on Cybernetics, Robotics and Control (CRC), 2017: 28-32.
3) Apply Husky to farmland and orchard environment for SLAM mapping and intelligent monitoring of crops
Habibie N, Nugraha A M, Anshori A Z, et al. Fruit mapping mobile robot on simulated agricultural area in Gazebo simulator using simultaneous localization and mapping (SLAM)[C]. 2017 International Symposium on Micro-NanoMechatronics and Human Science (MHS), 2017: 1-7.
4)Based on machine learning method to identify the target and plan the robot movement path
Ø Paxton C, Katyal K, Rupprecht C, et al. Learning to Imagine Manipulation Goals for Robot Task Planning. arXiv e-prints. 2017.
Ø Paxton C, Barnoy Y, Katyal K, et al. Visual Robot Task Planning. arXiv e-prints. 2018.
5) Path selection of mobile robot based on fuzzy inference
Shiwei W, Panzica A C, Padir T. Motion control for intelligent ground vehicles based on the selection of paths using fuzzy inference[C]. 2013 IEEE Conference on Technologies for Practical Robot Applications (TePRA), 2013: 1-6.
2. Human-machine collaboration
1) Communication and collaboration between soldiers and robots in a war environment
Barber D J, Abich J, Phillips E, et al. Field Assessment of Multimodal Communication for Dismounted Human-Robot Teams[J]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2015, 59(1): 921-925.
2) Husky collaborates with SWAT
Bethel C L, Carruth D, Garrison T. Discoveries from integrating robots into SWAT team training exercises[C]. 2012 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2012: 1-8.
3) Language-driven navigation method for controlling mobile robots in outdoor environments
Boularias A, Duvallet F, Oh J, et al. Grounding spatial relations for outdoor robot navigation[C]. 2015 IEEE International Conference on Robotics and Automation (ICRA), 2015: 1976-1982.
4) Mobile robots are used for patrol, surveillance, search and rescue and human dangerous tasks
Arokiasami W A, Vadakkepat P, Tan K C, et al. Interoperable multi-agent framework for unmanned aerial/ground vehicles: towards robot autonomy[J]. Complex & Intelligent Systems, 2016, 2(1): 45-59.
5) Apply Husky to human-machine intelligent interaction system
Jevtić A, Lucet E, Kozlov A, et al. INTRO: A multidisciplinary approach to intelligent Human-Robot Interaction[C]. World Automation Congress 2012, 2012: 1-6.
6) Human-machine voice interactive control
Ø Chung I, Propp O, Walter M R, et al. On the performance of hierarchical distributed correspondence graphs for efficient symbol grounding of robot instructions[C]. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015: 5247-5252.
Ø Pourmehr S, Thomas J, Vaughan R. What Untrained People Do When Asked "Make The Robot Come To You"[C]. The Eleventh ACM/IEEE International Conference on Human Robot Interaction, 2016: 495-496.
3. Hazardous scene operation
1) Husky is used to participate in the Humanitarian Robotics and Automation Technology Challenge (HRATC) challenge for rescue and dangerous operations.
Madhavan R, Marques L, Prestes E, et al. 2015 humanitarian robotics and automation technology challenge. IEEE-INST ELECTRICAL ELECTRONICS ENGINEERS, 2015.
2) Remotely operate the robot to complete specific tasks or dangerous tasks
Cabrita G, Madhavan R, Marques L. A Framework for Remote Field Robotics Competitions[C]. 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, 2015: 192-197.
3) Research on Robot Movement Strategy under Task Command and Environment Constraint in War Environment
Talone A B, Phillips E, Ososky S, et al. An Evaluation of Human Mental Models of Tactical Robot Movement[J]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2015, 59(1): 1558-1562.
4. Multi-robot collaboration
1) Multi-robot distributed scheduling optimization
Kattepur A, Dohare H, Mushunuri V, et al. Resource Constrained Offloading in Fog Computing[J], 2016.
2) Multi-robot cluster collaborative search and rescue
Kumar A S, Manikutty G, Bhavani R R, et al. Search and rescue operations using robotic darwinian particle swarm optimization[C]. 2017 International Conference on Advances in Computing, Communications and Informatics (ICACCI), 2017: 1839-1843.
3) Multi-robot monitoring system
Hill R C, Lafortune S. Scaling the formal synthesis of supervisory control software for multiple robot systems[C]. 2017 American Control Conference (ACC), 2017: 3840-3847.
5. Robot control and analysis
1) Use neural networks for robot motion control
Hinkel G, Groenda H, Vannucci L, et al. A domain-specific language (DSL) for integrating neuronal networks in robot control[C]. Proceedings of the 2015 Joint MORSE/VAO Workshop on Model-Driven Robot Software Engineering and View-based Software-Engineering, 2015: 9-15.
2) Robust control of robot trajectory tracking based on learning
Ø Ostafew C J, Schoellig A P, Barfoot T D. Conservative to confident: Treating uncertainty robustly within Learning-Based Control[C]. 2015 IEEE International Conference on Robotics and Automation (ICRA), 2015: 421-427.
Ø Ostafew C J, Schoellig A P, Barfoot T D. Learning-based nonlinear model predictive control to improve vision-based mobile robot path-tracking in challenging outdoor environments[C]. 2014 IEEE International Conference on Robotics and Automation (ICRA), 2014: 4029-4036.
Ø Ostafew C J, Schoellig A P, Barfoot T D, et al. Learning-based Nonlinear Model Predictive Control to Improve Vision-based Mobile Robot Path Tracking[J]. Journal of Field Robotics, 2016, 33(1): 133-152.
Ø Ostafew C J, Schoellig A P, Barfoot T D. Robust Constrained Learning-based NMPC enabling reliable mobile robot path tracking[J]. The International Journal of Robotics Research, 2016, 35(13): 1547-1563.
3) Develop new tools for monitoring and debugging distributed robot systems, and supplement the robot middleware system
Monajjemi V, Wawerla J, Vaughan R. Drums: A Middleware-Aware Distributed Robot Monitoring System[C]. 2014 Canadian Conference on Computer and Robot Vision, 2014: 211-218.
4) Use Husky to verify the multi-modal model of online learning robot dynamics, develop new tools for monitoring and debugging distributed robot systems, and supplement the robot middleware system
Mckinnon C D, Schoellig A P. Learning multimodal models for robot dynamics online with a mixture of Gaussian process experts[C]. 2017 IEEE International Conference on Robotics and Automation (ICRA), 2017: 322-328.
5) Robot reachability analysis, analyze a variety of robots, including Husky+UR5
Makhal A, Goins A K. Reuleaux: Robot Base Placement by Reachability Analysis[C]. 2018 Second IEEE International Conference on Robotic Computing (IRC), 2018: 137-142.
6) Sliding robot path following in the field
Ø Rajagopalan V, M, Kelly A. Slip-aware Model Predictive optimal control for Path following[C]. 2016 IEEE International Conference on Robotics and Automation (ICRA), 2016: 4585-4590.
Ø Ostafew C J, Schoellig A P, Barfoot T D. Visual teach and repeat, repeat, repeat: Iterative Learning Control to improve mobile robot path tracking in challenging outdoor environments[C]. 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2013: 176-181.
7) Research on power characteristics of sliding robot
Dogru S, Marques L. Power Characterization of a Skid-Steered Mobile Field Robot[C]. 2016 International Conference on Autonomous Robot Systems and Competitions (ICARSC), 2016: 15-20.
6. survey
1) Husky loaded positioning equipment on the frozen lake to detect and locate fish in the lake.
Tokekar P, Hook J V, Isler V. Active target localization for bearing based robotic telemetry[C]. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011: 488-493.
2)Husky is equipped with measurement equipment to automatically monitor the structural health of some infrastructure such as bridges.
Lins R G, Givigi S N. Autonomous robot system architecture for automation of structural health monitoring[C]. 2016 Annual IEEE Systems Conference (SysCon), 2016: 1-7.
3) Install the gas sensor on Husky for gas detection and gas source positioning
Vuka M, Schaffernicht E, Schmuker M, et al. Exploration and localization of a gas source with MOX gas sensors on a mobile robot — A Gaussian regression bout amplitude approach[C]. 2017 ISOCS/IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), 2017: 1-3.
4) Install a spectrometer on Husky to look for potential biogas emissions from the ground
Anderson G T, Mahdi S, Khidir J, et al. Field studies of a robot system to measure ground emissions of methane[C]. 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2014: 808-812.
5) Robot-assisted gas tomography, gas source positioning
Bennetts V H, Schaffernicht E, Stoyanov T, et al. Robot assisted gas tomography — Localizing methane leaks in outdoor environments[C]. 2014 IEEE International Conference on Robotics and Automation (ICRA), 2014: 6362-6367.
7) Mining area surveying and mapping
Ø Neumann T, Ferrein A, Kallweit S, et al. Towards a mobile mapping robot for underground mines[C]. Proceedings of the 2014 PRASA, RobMech and AfLaT International Joint Symposium, Cape Town, South Africa, 2014: 27-28.
Ø Gallant M J, Marshall J A. Two-Dimensional Axis Mapping Using LiDAR[J]. IEEE Transactions on Robotics, 2016, 32(1): 150-160.
Ø Gallant M J, Marshall J A. Automated rapid mapping of joint orientations with mobile LiDAR[J]. International Journal of Rock Mechanics & Mining Sciences, 2016, 90: 1-14.
Ø Ferrein A, Kallweit S, Lautermann M. Towards an autonomous pilot system for a tunnel boring machine[C]. 2012 5th Robotics and Mechatronics Conference of South Africa, 2012: 1-6.
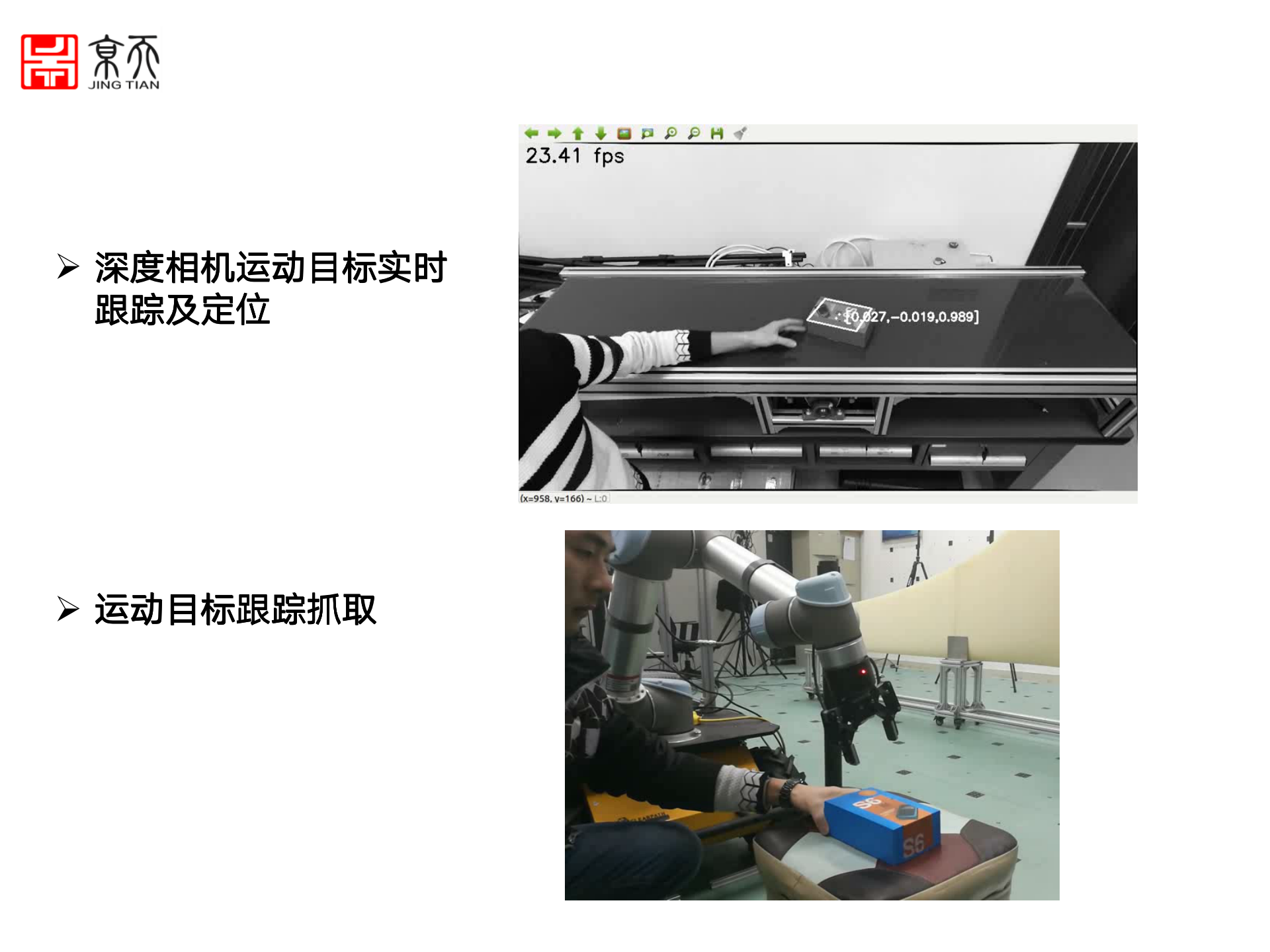
7. Moving target tracking
1) Apply insect neurophysiology knowledge to mobile robot target tracking
Bagheri Z M, Cazzolato B S, Grainger S, et al. An autonomous robot inspired by insect neurophysiology pursues moving features in natural environments[J]. Journal of neural engineering, 2017, 14(4): 046030.
2) Husky tracks and follows people
Ø Olmedo N A, Zhang H, Lipsett M. Mobile robot system architecture for people tracking and following applications[C]. 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), 2014: 825-830.
Ø Leigh A, Pineau J, Olmedo N, et al. Person tracking and following with 2D laser scanners[C]. 2015 IEEE International Conference on Robotics and Automation (ICRA), 2015: 726-733.


Basic Edition

Option II

third solution
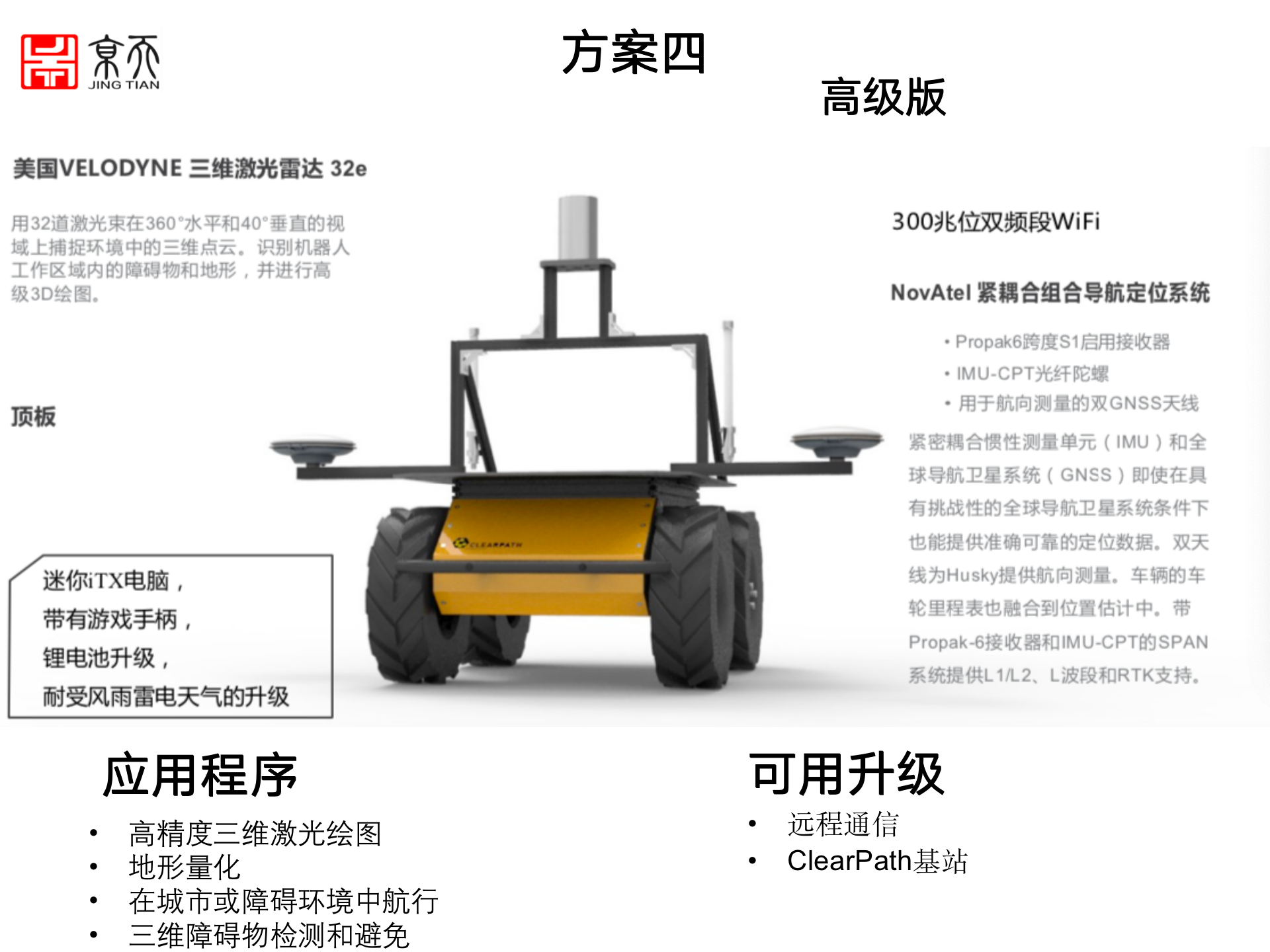
Option Four
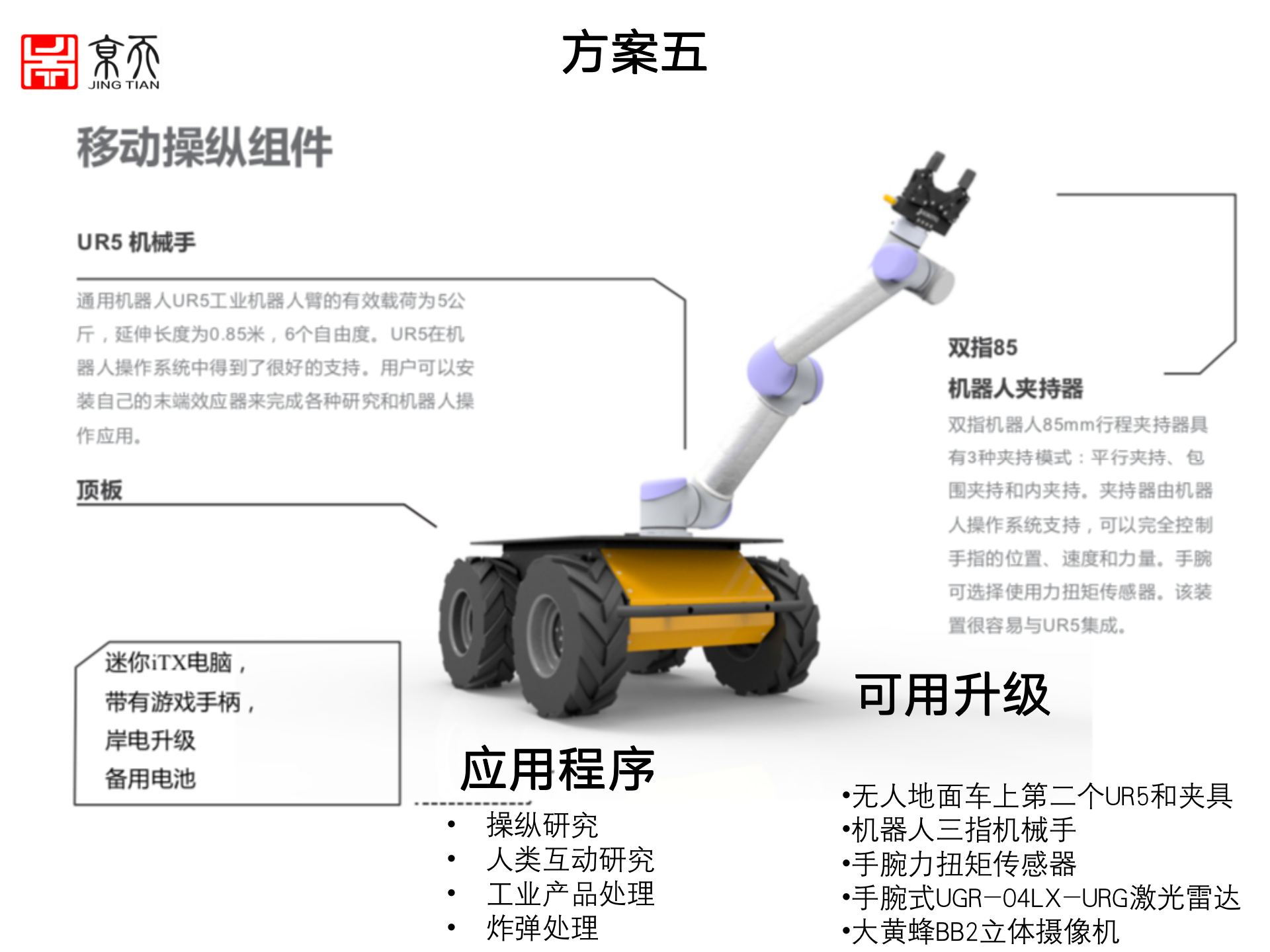
Option Five

Application Case-University of Toronto
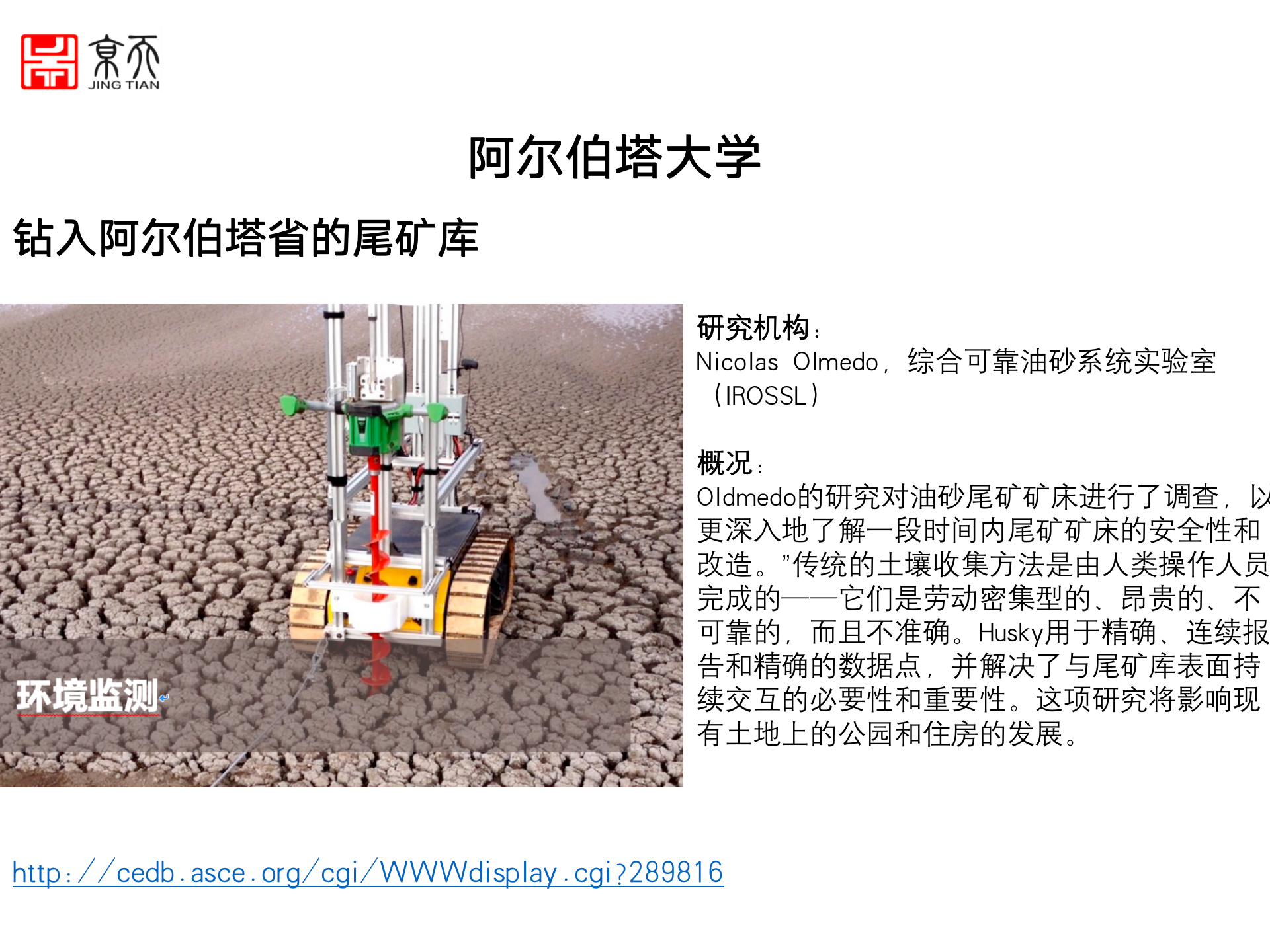
Application Case-University of Alberta
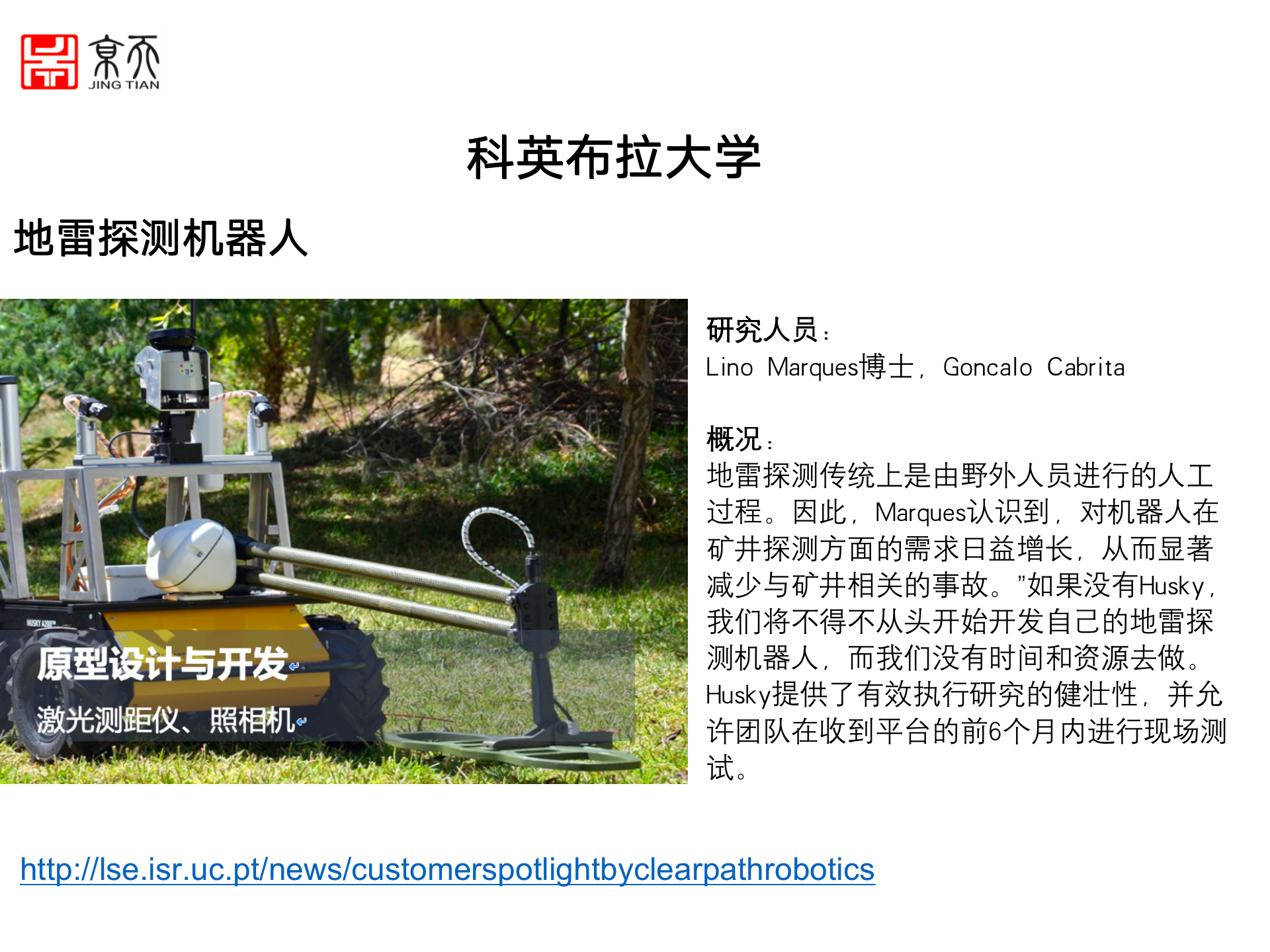
Application case-University of Coimbra

Xuanwu Robot 5


Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































