上海科技大学【采集高分辨率数据集推动SLAM研究】
客户名称:上海科技大学
应用类型:地图构建、定位和导航(SLAM)
项目时间:2020年09月
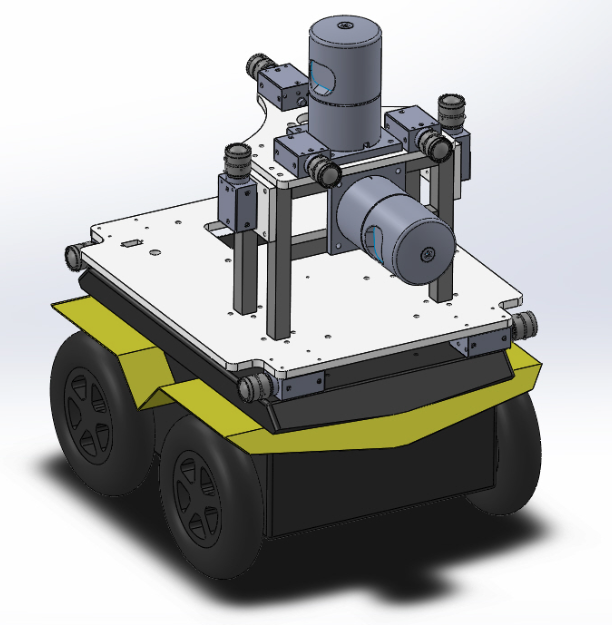
应用产品:玄武2号与自制传感器集成
应用类型:算法的测试和应用
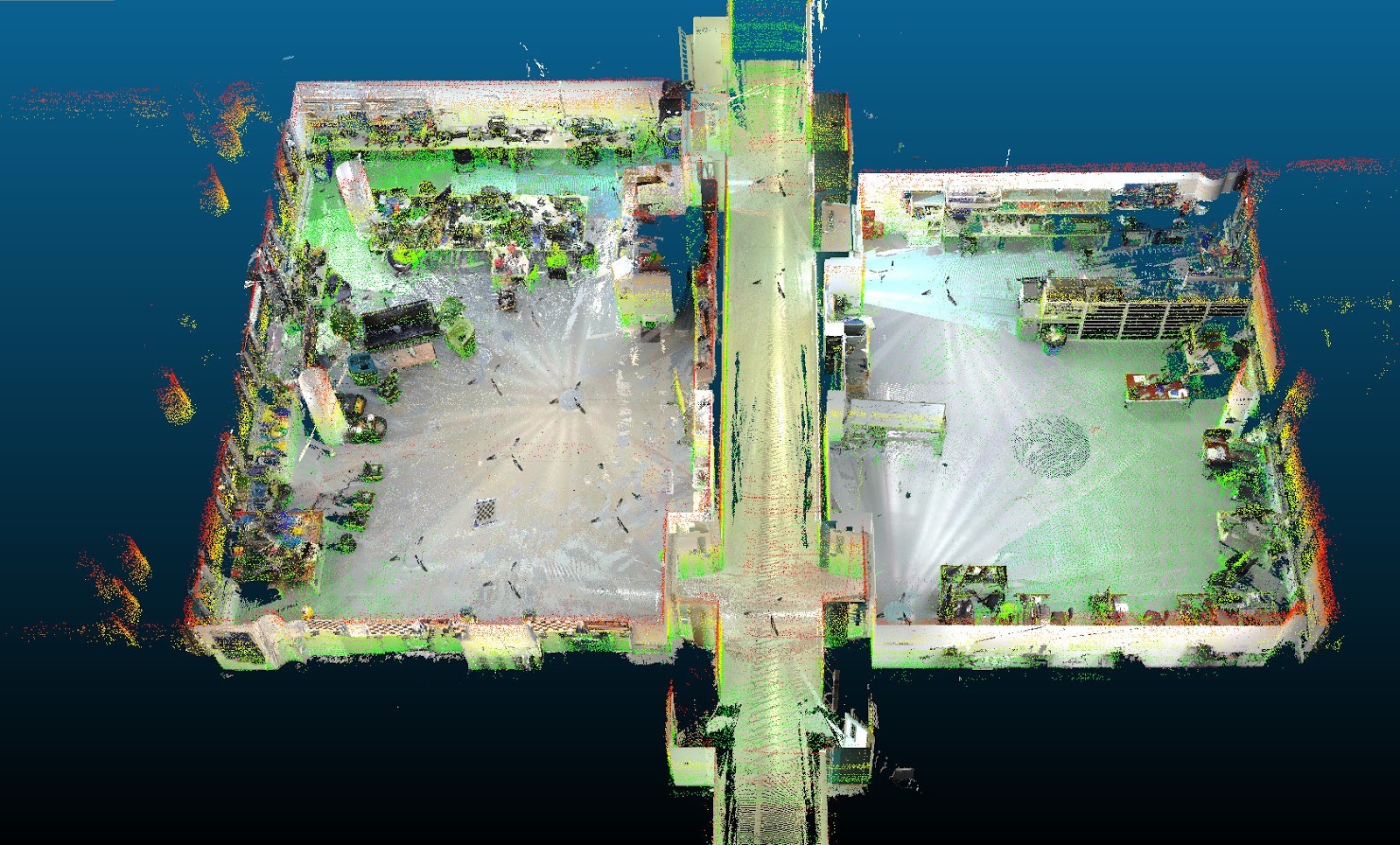
项目概述:基于玄武2号的项目的目的是通过先进的地图绘制机器人(在移动机器人中具有“以前从未见过”的传感器套件)为SLAM社区生成可理解的高分辨率数据集。该项目的主要挑战是开发可靠的地图绘制机器人和用于数据记录的相应软件系统。团队的真正重点是他们算法的测试和应用。他们不想花费宝贵的时间从头开始构建新的移动平台,因此,他们选择使用预先构建的,可立即使用的玄武2号。使玄武2号脱颖而出的原因是其坚固性和可靠性,高速,高移动性以及易于获取的文档。
项目成果:
项目取得了巨大的成功并发布了三个数据集。该项目是信息科学与技术学院(SIST),上海科技自动化和机器人中心(STAR中心)和移动自主机器人系统实验室(MARS Lab)的合作。如果有实验室建设需求欢迎留言与我们取得联系。






 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 

































