



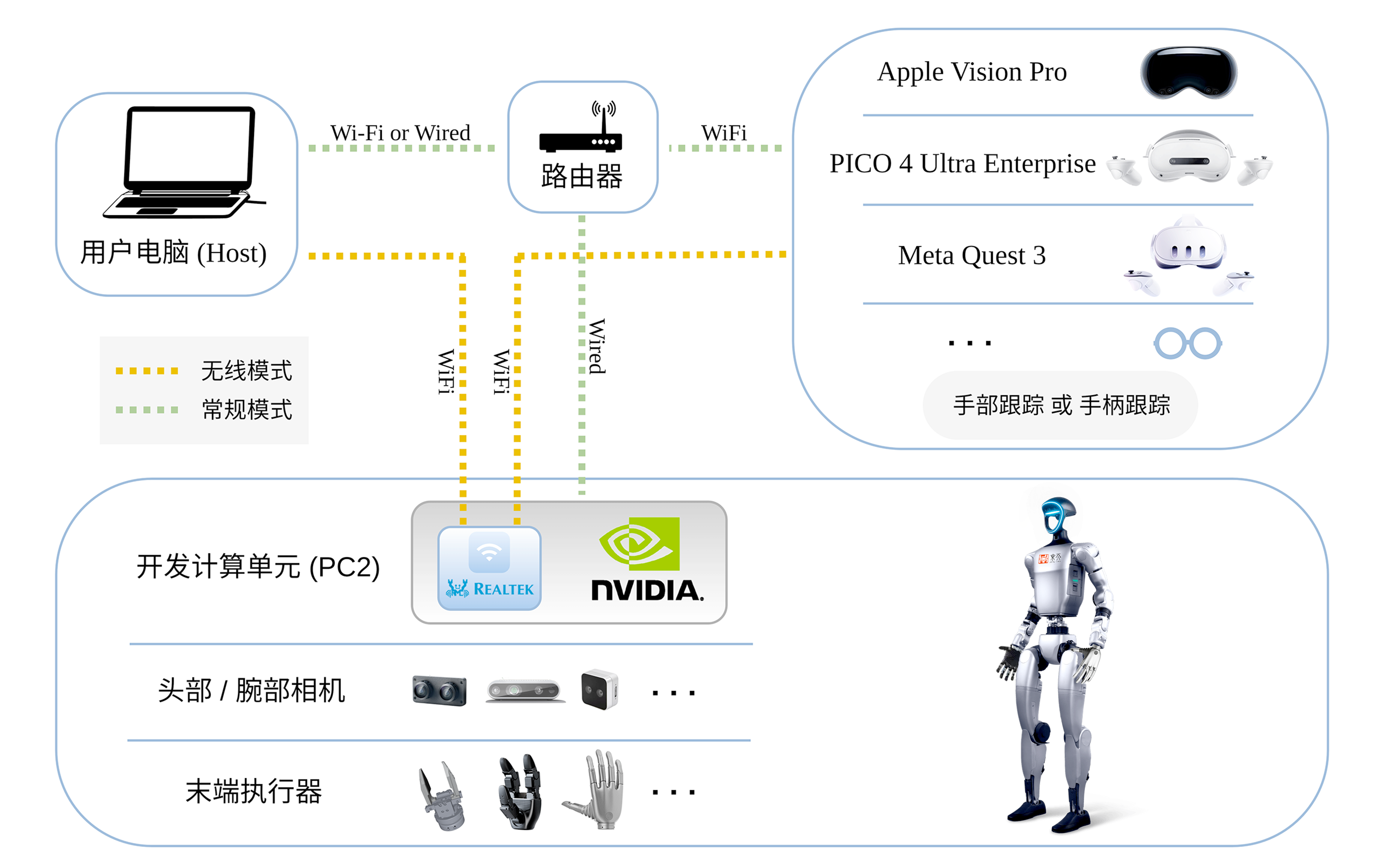
本套遥操作数据采集方案专为高校科研教学打造,方案配置 G1 人形机器人,末端搭载强脑 Revo2 五指灵巧手,配套 PICO VR 套件,提供遥操作方案部署。依托 VR 沉浸式立体视觉实时回传,可同步复刻人体姿态与手部精细动作,低时延远程完成物体抓取、精密交互等实操任务。 运行过程中同步采集机器人关节数据、手部动作参数、全景视觉等多维原始数据,适配具身智能、模仿学习、人机交互等前沿课题研究。配套完整调试、存储与数据回放工具,部署便捷,充分满足高校实训授课、数据集构建与师生二次开发需求。
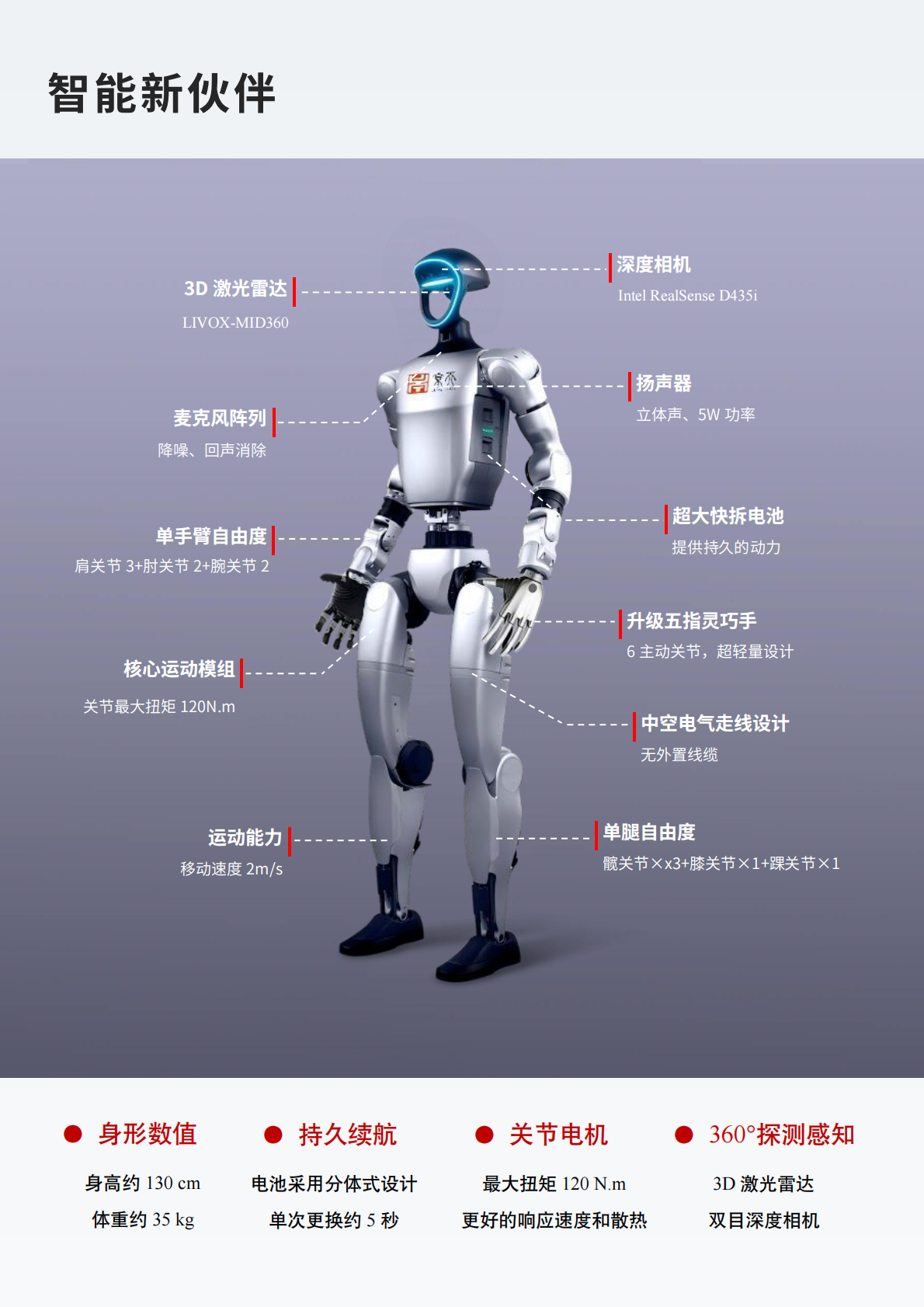

| 尺寸 | 1320 mm×450 mm×200 mm |
| 膝关节最大扭矩 | 120N.m |
| 智能电池(快拆) | 9000 mAh 支持续航约2h |
| 腰关节运动空间 | Z ± 155 °、X ± 45°、Y ± 30° |
| 算力模块 | 八核高性能 CPU + NVIDIA Jetson Orin 高算力模组 |
| 整机重量 | 约35kg |
| 手臂最大负载 | 3kg |
| OTA升级 | 支持 |
| 髋关节运动空间 | P ± 154 °、R - 30 ~ + 170°、Y ± 158° |
| 运动控制 | 具备全向行走、自平衡能力,标配多种舞蹈动作等 |



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |
































