


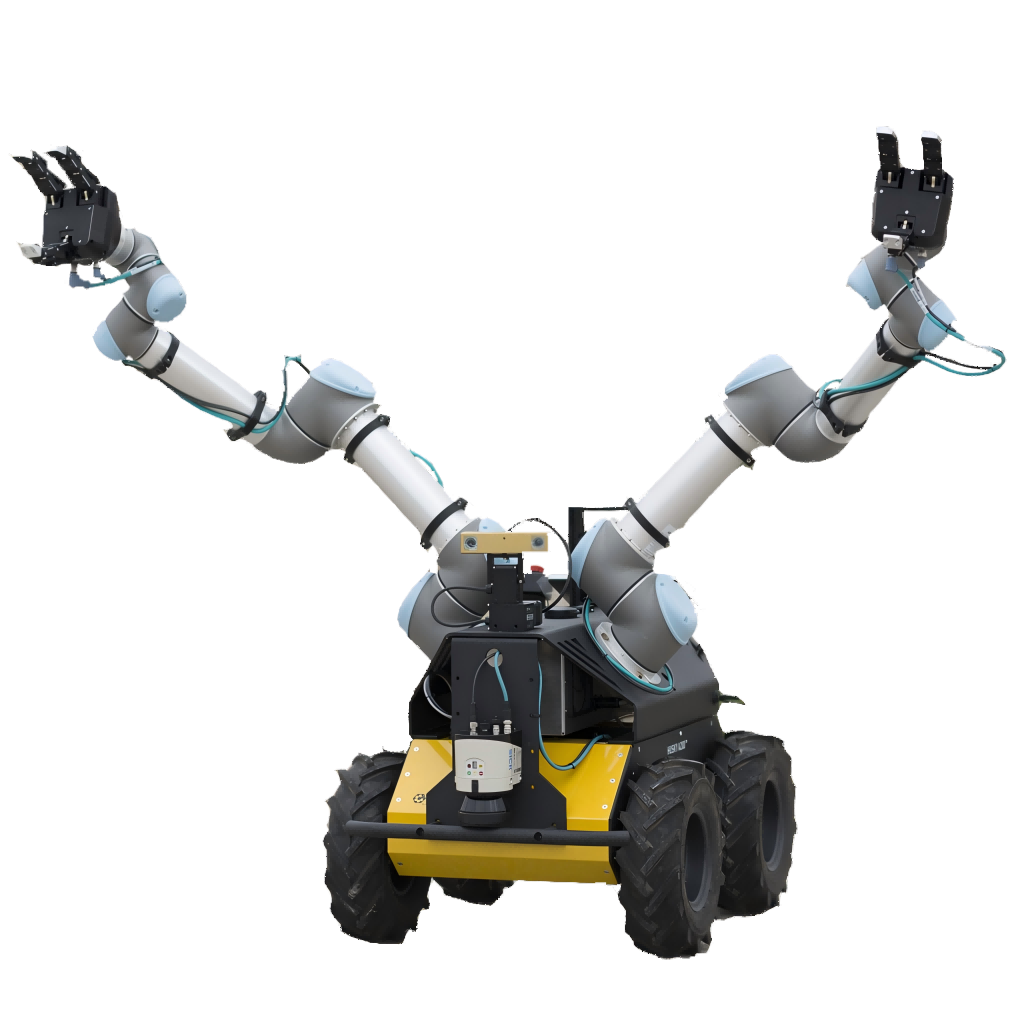
The XANWU 10 dual arm mobile robot solution is based on the ROS system and has multiple functions such as cloud computing and artificial intelligence technology, virtual simulation, and real-time monitoring. Equipped with a comprehensive perception module, real-time data collection, environmental analysis, automatic positioning and navigation planning, achieving efficient and mobile composite operations. This solution integrates hands, feet, and eyes, which can efficiently replace manual work, achieve intelligent production throughout the process, and avoid the operational risks caused by manual work. The application scenarios include: explosive disposal of dangerous goods, cargo handling, product sorting, and replacing humans to survey dangerous locations. It can also be used for teaching and research, including human-machine coordination, robot learning, flexible operation, remote operation, whole body control, robot grasping, and multimodal collaborative assembly, etc.
| size | 990x670x390mm |
| chassis load | 70kg |
| power | 1000W (peak value); 400W (continuous value) |
| degree of freedom | 12 |
| repeatability | ±0.03mm |
| rotation range | ±360° |
| trip | 85mm |
| weight | 50kg |
| maximum speed | 1m/s |
| climbing angle | 45° |
| communication | RS-232,115200BAUD |
| mechanical arm load | 10kg |
| scope of work | 1700mm |
| maximum rotation speed | 180°/s |
| clamping force | 20-235N |





Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































